when nodes are launched. We could also use an <icon> or <logo> tag to
> I created a wiki page for the SIG and added the ideas from this
> thread: http://www.ros.org/wiki/hydromedusa/Planning/roslaunch
>
> On Tue, Aug 14, 2012 at 12:05 PM, Jonathan Bohren
> <jonathan.bohren@gmail.com> wrote:
> On Tue, Aug 14, 2012 at 6:14 PM, Lorenzo Riano
> <lorenzo.riano@berkeley.edu> wrote:
> I would have a long list of suggestions. Is anybody
> setting up a SIG?
>
> Lorenzo
>
> On Tue, Aug 14, 2012 at 4:14 AM, Weißhardt, Florian
> <Florian.Weisshardt@ipa.fraunhofer.de> wrote:
>
> +1
>
> -----Ursprüngliche Nachricht-----
> Von: ros-users-bounces@code.ros.org
> [mailto:ros-users-bounces@code.ros.org] Im
> Auftrag von Brice Rebsamen
> Gesendet: Dienstag, 14. August 2012 04:20
> An: User discussions
> Betreff: Re: [ros-users] Extending roslaunch
>
>
> I'd like to suggest adding the 'machine'
> attribute to the 'include'
> and 'group' tags.
> Brice
>
>
> On Mon, Jul 23, 2012 at 10:52 PM, Dan
> Lazewatsky <lazewatskyd@cse.wustl.edu> wrote:
> > I think there are a lot of potential changes
> that could make roslaunch
> > easier to user. Maybe we should setup a SIG
> to discuss these things,
> > even if it is too late to do so for Groovy.
> >
> > -Dan
> >
> >
> > On Mon, Jul 23, 2012 at 7:55 AM, Cedric
> Pradalier
> > <cedric.pradalier@gmail.com> wrote:
> >>
> >> Hi,
> >>
> >> If we discuss roslaunch extension, one very
> important thing would be
> >> to add dependencies, i.e. launch prog X
> once Y is running...
> >> I know this raises all kind of complicated
> issues especially when
> >> respawning but it would avoid developing
> the corresponding logic in
> >> each node.
> >>
> >> Regards
> >>
> >>
> >> On Mon, Jul 23, 2012 at 2:01 PM, Bill
> Morris
> >> <bill@iheartengineering.com>
> >> wrote:
> >>>
> >>> Does anyone have any opinions on extending
> the roslaunch and its XML
> >>> format?
> >>>
> >>> I would like to propose modifications to
> the <launch> tag by adding
> >>> a 'name' and 'description' attributes or
> elements. Icon information
> >>> might also be nice as well, but isn't
> really as important. These
> >>> will help make it easier to figure out
> what your launch files do in
> >>> a way that is machine readable for other
> applications.
> >>>
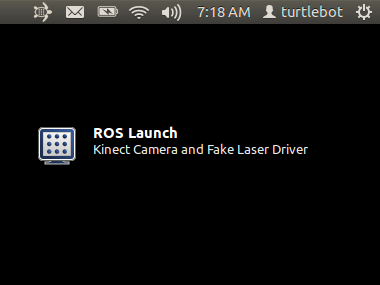
> >>> For example, one idea is to be able to
> double click on a launch file
> >>> have it start without a terminal, then it
> could call libnotify with
> >>> the name and description of the launch
> file that was started.
> >>>
> >>> This would provide helpful feedback to the
> user as some launch files
> >>> take a while to actually start.
> >>>
> >>> One issue I see is that libnotify/dbus
> seem designed to work on the
> >>> local machine and multi master will
> probably fail. One fix for this
> >>> might be to have roslaunch broadcast the
> Name and Description of
> >>> each launch file it starts on a topic.
> Another node could then
> >>> bridge this topic to libnotify.
> >>>
> >>> tl;dr
> >>> launch file as a desktop icon, click it,
> too long to start.
> >>> What is the easiest way to fix?
> >>>
> >>> --
> >>> Bill Morris <bill@iheartengineering.com> I
> Heart Engineering
> >>> http://www.iheartengineering.com
> >>> <3
> >>>
> >>>
> _______________________________________________
> >>> ros-users mailing list
> >>> ros-users@code.ros.org
> >>>
> https://code.ros.org/mailman/listinfo/ros-users
> >>
> >>
> >>
> >>
> >> --
> >> Cedric Pradalier
>
>
>
> Well the primary Groovy SIG feature freeze is tomorrow, but
> you can definitely start planning one for Hydromedusa.
>
>
> -j
>
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users
>
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users






 (text/plain)
(text/plain)
