Hi,
Thanks for your answers. However it still doesn't work :S
I copied the output of the commands Wim sent me at the end of the email.
roswtf give me an error: Local network configuration is invalid: Local
hostname [ulster] resolves to [127.0.1.1], which does not appear to be a
local IP address ['10.1.1.146', '127.0.0.1'].
I don't understand as my ROS_MASTER_URI is correctly set.
echo $ROS_MASTER_URI
http://10.1.1.146:11311
Cheers,
Ugo
-------------
> rosnode list
/robot_state_publisher
/rosout
/shadowhand_publisher
--------------
> rostopic info /joint_states
Type: sensor_msgs/JointState
Publishers:
* /shadowhand_publisher (
http://ulster:35258/)
Subscribers: None
------------
rosnode info robot_state_publisher
Node [/robot_state_publisher]
Publications:
* /rosout [roslib/Log]
Subscriptions:
* /time [unknown type]
* /clock [unknown type]
Services:
* /robot_state_publisher/get_loggers
* /robot_state_publisher/set_logger_level
contacting node http://ulster:59937/ ...
Pid: 3484
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
----------
roswtf
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
Found 1 error(s).
ERROR Local network configuration is invalid: Local hostname [ulster]
resolves to [127.0.1.1], which does not appear to be a local IP address
['10.1.1.146', '127.0.0.1'].
NOTE: for more accurate IP address detection, install netifaces:
sudo easy_install netifaces
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
... done running graph rules
Online checks summary:
No errors or warnings
Vijay Pradeep wrote:
> Hi Ugo,
>
> I'm guessing this line isn't doing what you want it to:
> * <param name="joint_states" value="/joint_states"/>*
>
> This should probably instead be a <remap> tag, since joint_states is a
> topic and not a parameter. You could also potentially get rid of this
> line entirely, assuming that nothing has been pushed into namespaces.
> That is, "joint_states" and "/joint_states" resolve to the same name for
> nodes in the "/" namespace.
>
> Vijay
>
> On Wed, Mar 31, 2010 at 10:22 AM, Wim Meeussen
> <meeussen@willowgarage.com <mailto:meeussen@willowgarage.com>> wrote:
>
> > I don't understand what those 2 lines are for in the tutorial:
> > <remap from="robot_description" to="different_robot_description" />
> > <remap from="joint_states" to="different_joint_states" />
>
> These two lines are optional, to make the robot state publisher read
> the robot description from a different parameter, or to listen to
> joint states on a different topic. But since you are using the default
> names, you won't need these lines.
>
>
> Your launch file looks good. If the callbackJointState is never
> called, this probably means the robot state publisher is not connected
> to your joint state publisher. You should try some of the ros tools to
> verify which topics are connected:
> * rostopic info /joint_states --> This will show all the nodes that
> are publishing/subscribing to this topic
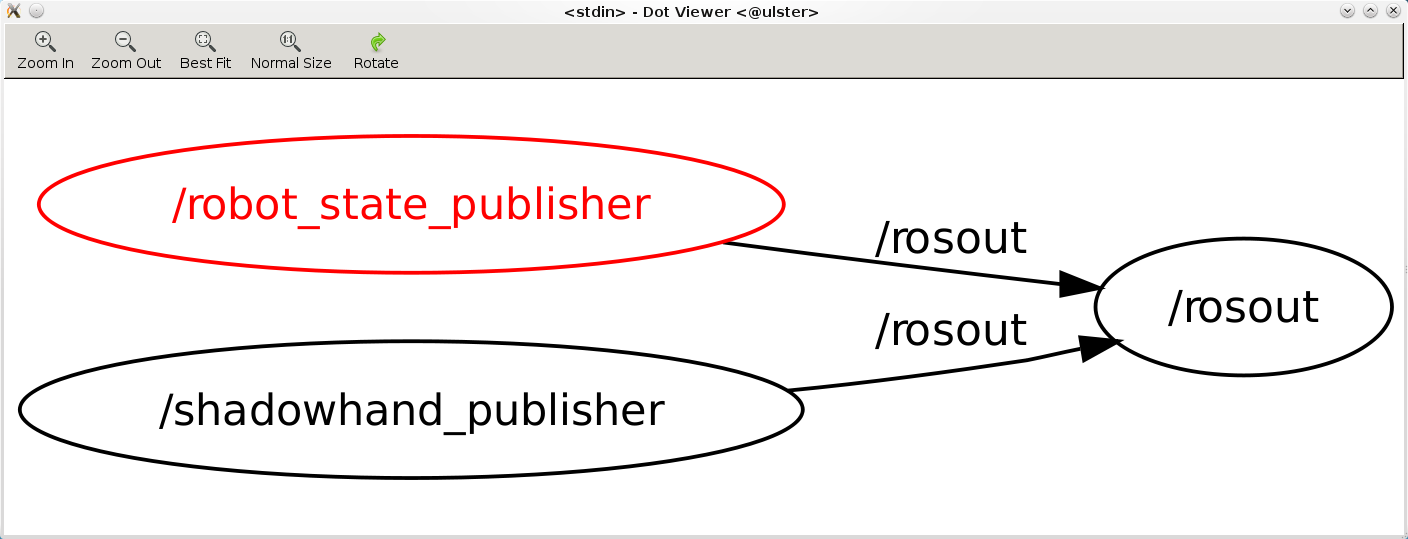
> * rxgraph --> This will give a graphical representation of the ros
> network
> * rosnode info robot_state_publisher --> This will show all topics
> used by the robot state publisher
> * roswtf --> This will tell you about problems (such as unconnected
> topics) in your system
>
> Also, when you are running nodes, make sure you are running rxconsole.
> Not all user feedback gets printed to the terminal and you might be
> missing some useful feedback.
>
> Wim
>
>
>
>
> --
> Wim Meeussen
> Willow Garage Inc.
> <http://www.willowgarage.com)
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org <mailto:ros-users@code.ros.org>
> https://code.ros.org/mailman/listinfo/ros-users
>
>
>
> ------------------------------------------------------------------------
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users
--
Ugo Cupcic | Shadow Robot Company | ugo@shadowrobot.com
Software Engineer 251 Liverpool Road
need a Hand? London N1 1LX | +44 20 7700 2487
http://www.shadowrobot.com/hand/ @shadowrobot








 (text/plain)
(text/plain)