Hi all,
I'm trying to run the erratic gazebo path planning, using the willow garage
map provided.
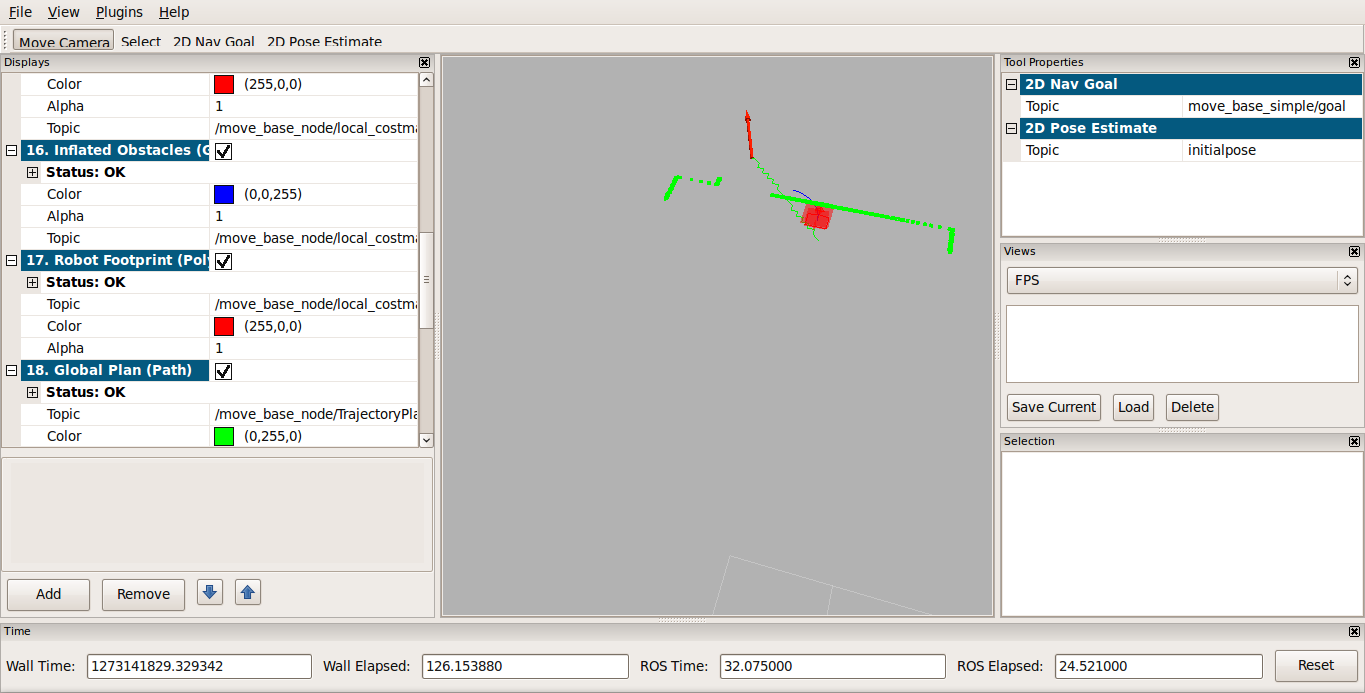
I'm using all custom parameters. However, the path planning seems to be
faltering. It is actually planning a path through the wall, I've also
attached a picture showing the path planning.
Also, the inflated costmap is not being displayed, although the messages are
being published and the rviz status says ok.
Any idea what might be wrong?
--
Regards,
Hitesh Dhiman
Electrical Engineering
National University of Singapore








 (text/plain)
(text/plain)