Hi,
Thank you very much John !!! Thanks for your clear explanation.
I guess it's better for me to start from scratch. ^_^
I started to test gazebo demos from here
http://www.ros.org/wiki/simulator_gazebo/Tutorials/SpawningObjectInSimulation
Yes, it works.
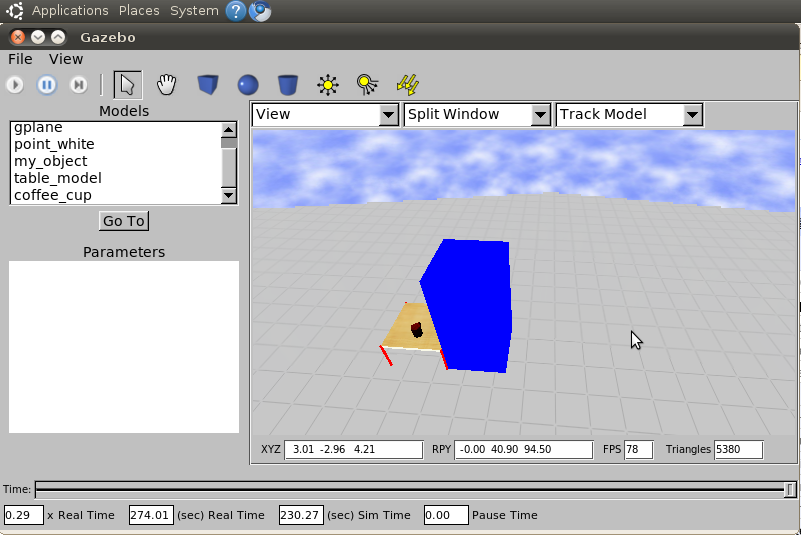
However, unfortunately, as the picture attached,
shadows failed to be shown compared to the demos shown on the above linkage,
How to enable gazebo shadows?
Cheers
JIA
On Sat, Sep 11, 2010 at 12:17 PM, Peter Brook <
pbrook@cs.washington.edu>wrote:
> Hey,
>
> I don't know much about those questions, but if you try setting ROBOT=pr2
> rather than PR2 it might work.
>
> Peter
>
> On Sep 10, 2010 6:34 PM, "JIA Pei" <jp4work@gmail.com> wrote:
> > Hi, John:
> >
> > Sorry to bother you again.
> >
> > 1)
> > I checked out pr2_2dnav_gazebo and put it under the corresponding folder
> of
> > my installed ROS.
> > say: /opt/ros/cturtle/stacks/wg_robots_gezebo/pr2_2dnav_gazebo
> >
> > When I do roslaunch
> > "roslaunch pr2_2dnav_gazebo pr2-armless-wg-fake_localization.launch"
> > I got 'ROBOT' is not set
> >
> > jiapei@jiapei-laptop:/opt/ros/cturtle/stacks/wg_robots_gezebo$ roslaunch
> >> pr2_2dnav_gazebo pr2-armless-wg-fake_localization.launch
> >> ... logging to
> >>
> /home/jiapei/.ros/log/73e7b77a-bd42-11df-8314-0040d0a919ff/roslaunch-jiapei-laptop-4044.log
> >> Checking log directory for disk usage. This may take awhile.
> >> Press Ctrl-C to interrupt
> >> Done checking log file disk usage. Usage is <1GB.
> >>
> >> environment variable 'ROBOT' is not set
> >>
> >
> >
> > Then, I set 'ROBOT' as "PR2" (I just guessed this, how to set
> > this environment variable? )
> > This time, I obtained "Invalid roslaunch XML syntax: [Errno 2] No such
> file
> > or directory" .
> >
> > jiapei@jiapei-laptop:/opt/ros/cturtle/stacks/wg_robots_gezebo$ export
> >>> ROBOT=PR2
> >>
> >> jiapei@jiapei-laptop:/opt/ros/cturtle/stacks/wg_robots_gezebo$
> roslaunch
> >>> pr2_2dnav_gazebo pr2-armless-wg-fake_localization.launch
> >>
> >> ... logging to
> >>>
> /home/jiapei/.ros/log/db1290a0-bd42-11df-b443-0040d0a919ff/roslaunch-jiapei-laptop-4091.log
> >>
> >> Checking log directory for disk usage. This may take awhile.
> >>
> >> Press Ctrl-C to interrupt
> >>
> >> Done checking log file disk usage. Usage is <1GB.
> >>
> >>
> >>> while processing
> >>>
> /opt/ros/cturtle/stacks/wg_robots_gezebo/pr2_2dnav_gazebo/2dnav-stack-fake_localization.launch:
> >>
> >> while processing
> >>>
> /opt/ros/cturtle/stacks/pr2_navigation/pr2_navigation_global/move_base.xml:
> >>>
> >>
> >> while processing
> >>> /opt/ros/cturtle/stacks/pr2_common/pr2_machine/PR2.machine:
> >>>
> >>
> >> Invalid roslaunch XML syntax: [Errno 2] No such file or directory:
> >>> u'/opt/ros/cturtle/stacks/pr2_common/pr2_machine/PR2.machine'
> >>
> >>
> >
> > So, my first question is: How to set 'ROBOT' for this pr2 2D navigation
> > simulation?
> >
> >
> > 2) My 2nd question is I found I've installed
> > "ros-cturtle-simulator-gazebo",
> > I'm wondering what are the connections between "pr2_2dnav_gazebo"
> > and "ros-cturtle-simulator-gazebo" ?
> > And, why "pr2_2dnav_gazebo" is not packaged into Ubuntu repository for
> > automatic installation?
> >
> > By the way, from the name of "ros-cturtle-simulator-gazebo",
> > I'm guessing, by using "ros-cturtle-simulator-gazebo" only,
> > am I able to simulate the robots navigation already, without checking
> > out "pr2_2dnav_gazebo" ?
> > Or, "ros" refers to the system without specifying a particular robot,
> > while "pr2" is a specific robot.
> > We have to specify a type of robot before its navigation?
> >
> > Sorry for my entry-level questions, but I really need your help.
> >
> >
> > Best Regards
> > JIA
> >
> >
> >
> > On Sat, Sep 11, 2010 at 1:32 AM, John Hsu <johnhsu@willowgarage.com>
> wrote:
> >
> >> Hi JIA,
> >> Sorry, my mistake, wg-ros-pkg trunk has been moved to
> >> branches/trunk_cturtle. I've updated the svn command accordingly:
> >>
> >> svn co
> https://code.ros.org/svn/wg-ros-pkg/branches/trunk_cturtle/stacks/wg_robots_gazebo/pr2_2dnav_gazebo
> >>
> >>
> >> John
> >>
> >>
> >>
> >> On Fri, Sep 10, 2010 at 5:05 AM, JIA Pei <jp4work@gmail.com> wrote:
> >>
> >>>
> >>> Hi, John:
> >>>
> >>> Sorry that I couldn't make it work yet.
> >>> It seems I'm not able to check out "pr2_2dnav_gazebo".
> >>>
> >>> jiapei@jiapei-laptop:~$ svn co
> >>>
> https://code.ros.org/svn/wg-ros-pkg/trunk/stacks/wg_robots_gazebo/pr2_2dnav_gazebo
> >>> svn: URL '
> >>>
> https://code.ros.org/svn/wg-ros-pkg/trunk/stacks/wg_robots_gazebo/pr2_2dnav_gazebo
> '
> >>> doesn't exist
> >>> jiapei@jiapei-laptop:~$
> >>>
> >>>
> >>> Any further suggestions?
> >>>
> >>>
> >>> Best Regards
> >>> JIA
> >>>
> >>>
> >>> On Fri, Sep 10, 2010 at 5:31 AM, John Hsu <johnhsu@willowgarage.com
> >wrote:
> >>>
> >>>> Hi JIA,
> >>>> I've fixed the tutorial<
> http://www.ros.org/wiki/pr2_2dnav_gazebo/Tutorials/Simulating%20the%202dnav%20Stack>page
> to include where to get pr2_2dnav_gazebo.
>
> >>>> Please let me know if you can test the nav stack successfully in sim.
> >>>> thanks,
> >>>> John
> >>>>
> >>>>
> >>>>
> >>>> On Thu, Sep 9, 2010 at 6:46 AM, JIA Pei <jp4work@gmail.com> wrote:
> >>>>
> >>>>>
> >>>>> Hi, all:
> >>>>>
> >>>>> Sorry for my amateur question.
> >>>>>
> >>>>> I'd love to try out some simple robot control demos of ROS.
> >>>>> So, I went to http://www.ros.org/wiki/AllTutorials and
> >>>>> tried pr2_simulator,
> >>>>> but it seems the tutorials here are too old and
> >>>>> I failed to find pr2_2dnav_gazebo (but pr2_2dnav found),
> >>>>> and pr2-simple-fake_localization.launch doesn't existing at all.
> >>>>>
> >>>>> So, can anybody please show me
> >>>>> where to find a runnable robot navigation or robot control demo of
> ROS,
> >>>>> including the source code,
> >>>>> so that I may be able to revise the source according to my own
> control
> >>>>> requirement?
> >>>>>
> >>>>> Thanks in advance.
> >>>>>
> >>>>> Best Regards
> >>>>> JIA
> >>>>>
> >>>>>
> >>>>>
> >>>>>
> >>>>>
> >>>>>
> >>>>>
> >>>>>
> >>>>> --
> >>>>> Welcome to Vision Open
> >>>>> http://www.visionopen.com
> >>>>>
> >>>>>
> >>>>>
> ------------------------------------------------------------------------------
> >>>>> This SF.net Dev2Dev email is sponsored by:
> >>>>>
> >>>>> Show off your parallel programming skills.
> >>>>> Enter the Intel(R) Threading Challenge 2010.
> >>>>> http://p.sf.net/sfu/intel-thread-sfd
> >>>>> _______________________________________________
> >>>>> ros-users mailing list
> >>>>> ros-users@lists.sourceforge.net
> >>>>> https://lists.sourceforge.net/lists/listinfo/ros-users
> >>>>>
> >>>>> _______________________________________________
> >>>>> ros-users mailing list
> >>>>> ros-users@code.ros.org
> >>>>> https://code.ros.org/mailman/listinfo/ros-users
> >>>>>
> >>>>>
> >>>>
> >>>> _______________________________________________
> >>>> ros-users mailing list
> >>>> ros-users@code.ros.org
> >>>> https://code.ros.org/mailman/listinfo/ros-users
> >>>>
> >>>>
> >>>
> >>>
> >>> --
> >>> Welcome to Vision Open
> >>> http://www.visionopen.com
> >>>
> >>> _______________________________________________
> >>> ros-users mailing list
> >>> ros-users@code.ros.org
> >>> https://code.ros.org/mailman/listinfo/ros-users
> >>>
> >>>
> >>
> >> _______________________________________________
> >> ros-users mailing list
> >> ros-users@code.ros.org
> >> https://code.ros.org/mailman/listinfo/ros-users
> >>
> >>
> >
> >
> > --
> > Welcome to Vision Open
> > http://www.visionopen.com
>
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users
>
>
--
Welcome to Vision Open
http://www.visionopen.com



 (text/plain)
(text/plain)
