Hi,
I'm experimenting a bit with the ar_pose package. I'm using a single
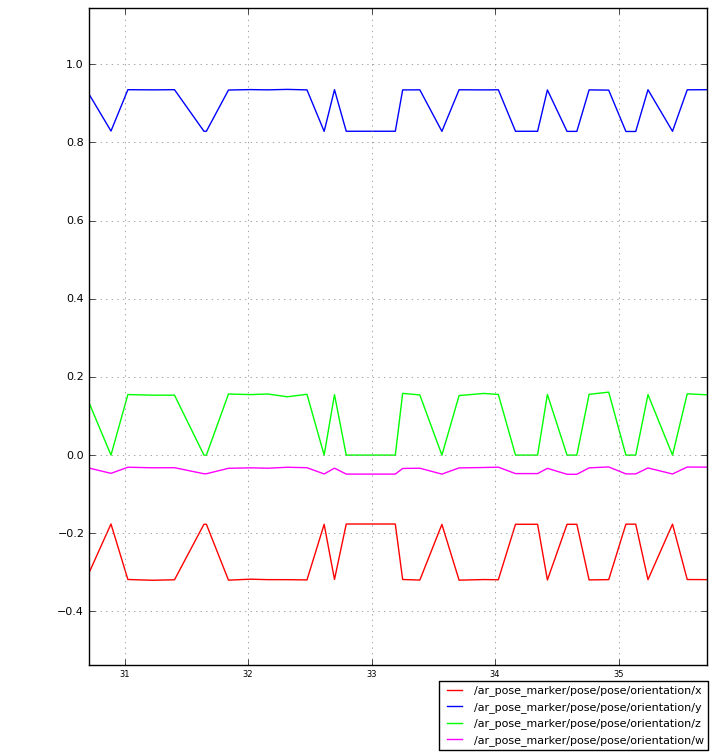
fixed camera to track a moving marker. To verify the estimation
accuracy, I just leave the marker fixed and I've plotted position and
orientation estimates. The position estimates are pretty much
constant, but the orientation estimates are oscilating a lot (see
appendix), and apparently always between two values. Is this because
of the bad capability to estimate that orientation or can this be
caused by the environment conditions (light - set-up - distance to
marker)?
regards,
Steven








 (text/plain)
(text/plain)