Hi!! Another thing is that when I run my program I have this warnings:
[ WARN] [1292518318.364947187, 0.448000000]: No transmissions were specified in the robot description.
[ WARN] [1292518318.365067348, 0.448000000]: None of the joints in the robot desription matches up to a motor. The robot is uncontrollable.
[ INFO] [1292518318.384784947, 0.448000000]: Server up
[ INFO] [1292518318.386512868, 0.448000000]: Spinning now
[ WARN] [1292518318.457107141, 0.448000000]: No transmissions were specified in the robot description.
[ WARN] [1292518318.457245309, 0.448000000]: None of the joints in the robot desription matches up to a motor. The robot is uncontrollable.
[ INFO] [1292518318.467271487, 0.448000000]: Callback thread id=0x3b1f9e0
[ WARN] [1292518318.585805210, 0.549000000]: Message from [/gazebo] has a non-fully-qualified frame_id [base_laser_link]. Resolved locally to [/base_laser_link]. This is will likely not work in multi-robot systems. This message will only print once.
[ WARN] [1292518318.585980041, 0.549000000]: Message from [/gazebo] has a non-fully-qualified frame_id [base_laser_link]. Resolved locally to [/base_laser_link]. This is will likely not work in multi-robot systems. This message will only print once.
Maybe has something to do with the model of my robot:
<?xml version="1.0"?>
<robot name="erratic"
xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:xacro="http://ros.org/wiki/fixme"
xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface">
<property name="M_PI" value="3.14159"/>
<property name="base_size_x" value="0.41" />
<property name="base_size_y" value="0.385" />
<property name="base_size_z" value="0.18" />
<property name="wheel_radius" value="0.075" />
<property name="wheel_length" value="0.02" />
<property name="caster_wheel_offset_y" value="0.17" />
<link name="base_link">
<inertial>
<mass value="10" />
<origin xyz="-0.1 0 ${base_size_z/2}" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0" />
</inertial>
<visual>
<origin xyz="-0.075 0 0.115" rpy="0 0 0" />
<geometry>
<box size="0.22 0.29 0.14" />
</geometry>
</visual>
<collision>
<origin xyz="-0.075 0 0.115" rpy="0 0 0" />
<geometry>
<box size="0.22 0.29 0.14" />
</geometry>
</collision>
</link>
<gazebo reference="base_link">
<material>Gazebo/Grey</material>
</gazebo>
<joint name="base_top_joint" type="fixed" >
<origin xyz="0 0 0.051" rpy="0 0 0" />
<parent link="base_link" />
<child link="base_top_link"/>
</joint>
<link name="base_top_link">
<inertial>
<mass value="1.0"/>
<origin xyz="0 0 ${base_size_z/2}" />
<inertia ixx="0.0652232699207" ixy="0.0" ixz="0.0"
iyy="0.0669473158652" iyz="0.0"
izz="0.0683196351726" />
</inertial>
<visual>
<origin xyz="-0.08 0 0.13" rpy="0 0 0" />
<geometry>
<box size="${base_size_x} ${base_size_y} 0.01" />
</geometry>
</visual>
<collision>
<origin xyz="-0.08 0 0.13" rpy="0 0 0" />
<geometry>
<box size="${base_size_x} ${base_size_y} 0.01" />
</geometry>
</collision>
</link>
<gazebo reference="base_top_link">
<material>Gazebo/BumpyMetal</material>
</gazebo>
<xacro:macro name="erratic_wheel" params="suffix parent reflect">
<joint name="${parent}_${suffix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*caster_wheel_offset_y} ${wheel_radius}" rpy="0 0 0" />
<axis xyz="0 1 0" />
<anchor xyz="0 0 0" />
<limit effort="100" velocity="100" />
<joint_properties damping="0.0" friction="0.0" />
<parent link="${parent}" />
<child link="${parent}_${suffix}_wheel_link" />
</joint>
<link name="${parent}_${suffix}_wheel_link">
<inertial>
<mass value="0.1" /> <!-- check jmh 20081205 -->
<origin xyz=" 0 0 0 " />
<inertia ixx="0.012411765597" ixy="0.0" ixz="0.0"
iyy="0.015218160428" iyz="0.0"
izz="0.011763977943" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
</collision>
</link>
<gazebo reference="${parent}_${suffix}_wheel_link" >
<mu1>50.0</mu1>
<mu2>50.0</mu2>
<kp>100000000.0</kp>
<kd>1.0</kd>
<material>Gazebo/Fish</material>
</gazebo>
</xacro:macro>
<xacro:erratic_wheel suffix="left" parent="base_link" reflect="1"/>
<xacro:erratic_wheel suffix="right" parent="base_link" reflect="-1"/>
<joint name="base_caster_box_joint" type="fixed">
<origin xyz="0 0 0.051" rpy="0 0 0" />
<parent link="base_link" />
<child link="base_caster_box_link"/>
</joint>
<link name="base_caster_box_link">
<inertial>
<mass value="0.1"/>
<origin xyz="0 0 ${base_size_z/2}" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz="-0.23 0 0.08" rpy="0 0 0" />
<geometry>
<box size="0.09 0.02 0.10" />
</geometry>
</visual>
<collision>
<origin xyz="-0.23 0 0.08" rpy="0 0 0" />
<geometry>
<box size="0.09 0.02 0.10" />
</geometry>
</collision>
</link>
<gazebo reference="base_caster_box_link">
<material>Gazebo/Grey</material>
</gazebo>
<joint name="base_caster_support_joint" type="continuous">
<axis xyz="0 0 1" />
<anchor xyz="0.01 0 0" />
<limit effort="100" velocity="100" k_velocity="0" />
<joint_properties damping="0.0" friction="0.0" />
<parent link="base_caster_box_link" />
<origin xyz="-0.265 0 0.0" rpy="0 0 0" />
<child link="base_caster_support_link"/>
</joint>
<link name="base_caster_support_link">
<inertial>
<mass value="0.1"/>
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.03 0.02 0.06" />
</geometry>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.03 0.02 0.06" />
</geometry>
</collision>
</link>
<gazebo reference="base_caster_support_link">
<material>Gazebo/Yellow</material>
</gazebo>
<joint name="caster_wheel_joint" type="continuous">
<origin xyz="-0.02 0 -0.02" rpy="0 0 0" />
<axis xyz="0 1 0" />
<anchor xyz="0 0 0" />
<limit effort="100" velocity="100" k_velocity="0" />
<joint_properties damping="0.0" friction="0.0" />
<parent link="base_caster_support_link" />
<child link="caster_wheel_link" />
</joint>
<link name="caster_wheel_link">
<inertial>
<mass value="0.1" />
<origin xyz=" 0 0 0 " />
<inertia ixx="0.012411765597" ixy="-0.000711733678" ixz="0.00050272983"
iyy="0.015218160428" iyz="-0.000004273467" izz="0.011763977943" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="0.03" length="0.01" />
</geometry>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="0.03" length="0.01" />
</geometry>
</collision>
</link>
<gazebo reference="caster_wheel_link">
<mu1>50.0</mu1>
<mu2>50.0</mu2>
<kp>100000000.0</kp>
<kd>1.0</kd>
<material>Gazebo/Blue</material>
</gazebo>
<joint name="base_laser_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.0 0 0.205"/>
<parent link="base_link"/>
<child link="base_laser_link"/>
</joint>
<link name="base_laser_link" type="laser">
<inertial>
<mass value="0.1"/>
<origin xyz="0 0 0.0"/>
<inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0.0"/>
<geometry>
<cylinder radius=".05" length=".05"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0.0"/>
<geometry>
<cylinder radius=".05" length=".05"/>
</geometry>
</collision>
</link>
<gazebo reference="base_laser_link">
<sensor:ray name="base_laser_link">
<resRange>0.1</resRange>
<rayCount>640</rayCount>
<rangeCount>640</rangeCount>
<laserCount>1</laserCount>
<origin>0.0 0.0 0.0</origin>
<displayRays>true</displayRays>
<minAngle>-100</minAngle> <!-- scans own arms if -135~+135 -->
<maxAngle>100</maxAngle>
<minRange>0.07</minRange>
<maxRange>10.0</maxRange>
<updateRate>20.0</updateRate>
<controller:gazebo_ros_laser name="gazebo_ros_base_laser_link_controller" plugin="libgazebo_ros_laser.so">
<gaussianNoise>0.005</gaussianNoise>
<alwaysOn>true</alwaysOn>
<updateRate>20.0</updateRate>
<topicName>base_scan</topicName>
<frameName>base_laser_link</frameName>
<interface:laser name="gazebo_ros_base_laser_link_iface"/>
</controller:gazebo_ros_laser>
</sensor:ray>
<material>Gazebo/Red</material>
</gazebo>
<gazebo>
<controller:differential_position2d name="controller1">
<update>100</update>
<leftJoint>base_link_right_wheel_joint</leftJoint>
<rightJoint>base_link_left_wheel_joint</rightJoint>
<wheelSeparation>${caster_wheel_offset_y*2}</wheelSeparation>
<wheelDiameter>${wheel_radius*2}</wheelDiameter>
<torque>5</torque>
<interface:position name="position_iface_0"/>
</controller:differential_position2d>
<controller:gazebo_ros_p3d name="p3d_base_controller" plugin="libgazebo_ros_p3d.so">
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<bodyName>base_link</bodyName>
<topicName>base_pose_ground_truth</topicName>
<gaussianNoise>0.01</gaussianNoise>
<frameName>map</frameName>
<xyzOffsets>25.7 25.7 0</xyzOffsets> <!-- initialize odometry for fake localization-->
<rpyOffsets>0 0 0</rpyOffsets>
<interface:position name="p3d_base_position"/>
</controller:gazebo_ros_p3d>
<!-- this publishes empty joint_states due to no transmission, but
triggering robot_state_puublisher to publish tf between fixed joints in erratic,
(e.g. base_laser_link for the base_scan frame) -->
<controller:gazebo_ros_controller_manager name="gazebo_ros_controller_manager" plugin="libgazebo_ros_controller_manager.so">
<alwaysOn>true</alwaysOn>
<updateRate>1000.0</updateRate>
<interface:audio name="gazebo_ros_controller_manager_dummy_iface" />
</controller:gazebo_ros_controller_manager>
</gazebo>
</robot>
Any clue??, I am lost here, jajaj.
Nicolas
From:
nicolasapicco@hotmail.com
To:
johnhsu@willowgarage.com
Subject: RE: [ros-users] Gazebo and Laser simulation
Date: Thu, 16 Dec 2010 07:37:37 -0300
John,
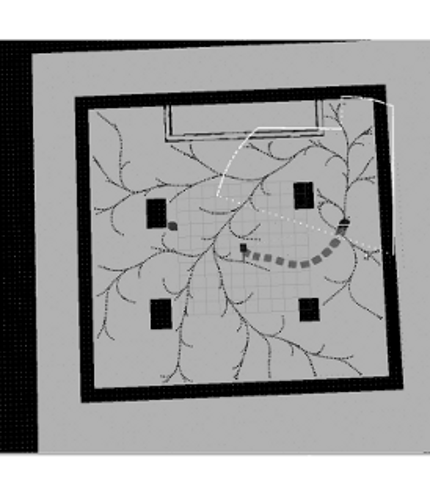
I will try to attach all the info that I can, first of all the image shows you the problem with the orientation of the laser taking as a reference the map.
Here goes the code:
THIS IS MY EMPTY WORLD
<?xml version="1.0"?>
<gazebo:world
xmlns:xi="
http://www.w3.org/2001/XInclude"
xmlns:gazebo="
http://playerstage.sourceforge.net/gazebo/xmlschema/#gz"
xmlns:model="
http://playerstage.sourceforge.net/gazebo/xmlschema/#model"
xmlns:sensor="
http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:window="
http://playerstage.sourceforge.net/gazebo/xmlschema/#window"
xmlns:param="
http://playerstage.sourceforge.net/gazebo/xmlschema/#param"
xmlns:body="
http://playerstage.sourceforge.net/gazebo/xmlschema/#body"
xmlns:geo="
http://willowgarage.com/xmlschema/#geo"
xmlns:geom="
http://playerstage.sourceforge.net/gazebo/xmlschema/#geom"
xmlns:joint="
http://playerstage.sourceforge.net/gazebo/xmlschema/#joint"
xmlns:interface="
http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
xmlns:ui="
http://playerstage.sourceforge.net/gazebo/xmlschema/#ui"
xmlns:rendering="
http://playerstage.sourceforge.net/gazebo/xmlschema/#rendering"
xmlns:renderable="
http://playerstage.sourceforge.net/gazebo/xmlschema/#renderable"
xmlns:controller="
http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:physics="
http://playerstage.sourceforge.net/gazebo/xmlschema/#physics" >
<thread>4</thread>
<verbosity>5</verbosity>
<!-- cfm is 1e-5 for single precision -->
<!-- erp is typically .1-.8 -->
<!-- here's the global contact cfm/erp -->
<physics:ode>
<stepTime>0.001</stepTime>
<gravity>0 0 -9.8</gravity>
<cfm>0.0000000001</cfm>
<erp>0.2</erp>
<quickStep>true</quickStep>
<quickStepIters>10</quickStepIters>
<quickStepW>1.3</quickStepW>
<contactMaxCorrectingVel>100.0</contactMaxCorrectingVel>
<contactSurfaceLayer>0.001</contactSurfaceLayer>
<updateRate>1000</updateRate> <!-- Para probar simulacion y tiempo real hecho por nico-->
</physics:ode>
<geo:origin>
<lat>37.4270909558</lat><lon>-122.077919338</lon>
</geo:origin>
<rendering:gui>
<type>fltk</type>
<size>480 320</size>
<pos>0 0</pos>
<frames>
<row height="100%">
<camera width="100%">
<xyz>0.3 0 3</xyz>
<rpy>0 90 90</rpy>
</camera>
</row>
</frames>
</rendering:gui>
<rendering:ogre>
<ambient>0.5 0.5 0.5 0.5</ambient>
<sky>
<material>Gazebo/CloudySky</material>
</sky>
<grid>false</grid>
<maxUpdateRate>10.</maxUpdateRate>
<shadowTechnique>none</shadowTechnique>
<shadows>false</shadows>
</rendering:ogre>
<!-- clock -->
<model:physical name="clock">
<xyz>0 0 0</xyz>
<rpy>0 0 0</rpy>
<static>true</static>
<body:box name="clock_body">
<geom:box name="clock_geom">
<mesh>default</mesh>
<size>0 0 0</size>
<visual>
<size>0 0 0</size>
<material>Gazebo/White</material>
<mesh>unit_box</mesh>
</visual>
</geom:box>
</body:box>
<!-- offer ROS services to spawn and delete models -->
<controller:gazebo_ros_factory name="gazebo_ros_factory" plugin="libgazebo_ros_factory.so">
<alwaysOn>true</alwaysOn>
<updateRate>1.0</updateRate>
</controller:gazebo_ros_factory>
</model:physical>
<!-- ground plane -->
<model:physical name="gplane">
<xyz>0 0 0</xyz>
<rpy>0 0 0</rpy>
<static>true</static>
<body:plane name="plane">
<geom:plane name="plane">
<laserRetro>2000.0</laserRetro>
<mu1>50.0</mu1>
<mu2>50.0</mu2>
<kp>1000000000.0</kp>
<kd>1.0</kd>
<normal>0 0 1</normal>
<size>51.3 51.3</size>
<segments>10 10</segments>
<uvTile>100 100</uvTile>
<material>Gazebo/GrayGrid</material>
</geom:plane>
</body:plane>
</model:physical>
<!--
<model:physical name="walls">
<include embedded="false">
<xi:include href="tests/willow-walls.model" />
</include>
</model:physical>
-->
<!--
<model:physical name="willow_map">
<xyz>-25.65 25.65 1.0</xyz>
<rpy>180 0 0</rpy>
<static>true</static>
<body:map name="willow_map_body">
<geom:map name="willow_map_geom">
<image>willowMap.png</image>
<threshold>200</threshold>
<granularity>1</granularity>
<negative>false</negative>
<scale>0.1</scale>
<offset>0 0 0</offset>
<material>Gazebo/Rocky</material>
</geom:map>
</body:map>
</model:physical>
-->
<!-- White Point light -->
<model:renderable name="point_white">
<xyz>0.0 0.0 8</xyz>
<enableGravity>false</enableGravity>
<light>
<type>point</type>
<diffuseColor>0.5 0.5 0.5</diffuseColor>
<specularColor>.1 .1 .1</specularColor>
<attenuation>0.2 0.1 0</attenuation>
<range>10</range>
</light>
</model:renderable>
</gazebo:world>
THIS ARE THE LAUNCH FILE THAT i AM USING:
<launch>
<arg name="scenario"/>
<arg name="launch_rviz" default="false"/>
<arg name="no_window" default="false" />
<!-- start up scenario world -->
<include file="$(find han_Scene)/launch/world.launch">
<arg name="scenario" value="$(arg scenario)"/>
<arg name="no_window" value="$(arg no_window)"/>
</include>
<!-- Static transforms -->
<include file="$(find han_Scene)/launch/static_transforms.launch"/>
<!-- Start the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find han_Scene)/scenarios/$(arg scenario)/map_config.yaml" />
<!-- =$(find wheelchair)/fete_nico_mapa.map.yaml"OJO HAY Q PONER LO Q ESTABA SOLO SIRVE PARA BAR UNICAMANTE -->
<!-- send robot description to param server -->
<param name="robot_description" command="$(find xacro)/xacro.py '$(find erratic_gazebo)/robots/erratic.urdf.xacro'" />
<!-- push robot_description to factory and spawn robot in gazebo -->
<node name="spawn_erratic" pkg="gazebo_tools" type="gazebo_model" args="-z 0.051 -p robot_description spawn robot_description" respawn="false" output="screen" />
<!-- Controller Manager -->
<include file="$(find pr2_controller_manager)/controller_manager.launch" />
<!-- Fake Calibration -->
<node pkg="rostopic" type="rostopic" name="fake_joint_calibration" args="pub /calibrated std_msgs/Bool true" />
<!-- load controllers -->
<node name="diffdrive" pkg="gazebo_plugins" type="gazebo_ros_diffdrive" respawn="true" output="log"/>
<!-- Scene runner -->
<node name="run_scene" pkg="han_Scene" type="run_scene" args="$(arg scenario)" respawn="false" output="screen"/>
<!--Lase filter of type scan_to_cloud_filter_chain -->
<!-- <node pkg="laser_filters" type="scan_to_cloud_filter_chain" name="tilt_shadow_filter">
<rosparam command="load" file="$(find han_Planner)/conf/laser_config.yaml" />
<rosparam command="load" file="$(find han_Planner)/conf/cloud_config.yaml" />
<param name="high_fidelity" value="true" />
<param name="target_frame" type="string" value="base_link" />
<remap from="base_scan" to="tilt_scan" />
<remap from="cloud_filtered" to="tilt_scan_cloud_filtered" />
</node> -->
<node pkg="point_cloud_converter" type="point_cloud_converter" name="point_cloud_converter">
<remap from="points_in" to="cloud_laser" />
<remap from="points2_out" to="cloud2_laser" />
</node>
<!-- RVIZ -->
<node name="rviz" pkg="rviz" type="rviz" respawn="false" output="screen" if="$(arg launch_rviz)"/>
</launch>
AND
<launch>
<arg name="scenario"/>
<arg name="no_window"/>
<!-- start gazebo with an empty plane -->
<param name="/use_sim_time" value="true" />
<!-- if no window is set then start with -r (no window displayed) -->
<node name="gazebo" pkg="gazebo" type="gazebo" args="-r $(find han_Scene)/worlds/empty.world" respawn="false" output="screen" if="$(arg no_window)"/>
<!-- Otherwise start normally -->
<node name="gazebo" pkg="gazebo" type="gazebo" args="$(find han_Scene)/worlds/empty.world" respawn="false" output="screen" unless="$(arg no_window)"/>
<!-- walls-->
<param name="walls" textfile="$(find han_Scene)/scenarios/$(arg scenario)/walls.model" />
<node name="xml2factor_walls" pkg="gazebo" type="spawn_model" args="-gazebo -param walls -model walls" respawn="false" output="screen" />
<!-- <node name="xml2factor_walls" pkg="gazebo" type="spawn_model" args="-gazebo -param walls -x -16 -y -16 -model walls" respawn="false" output="screen" /> -->
</launch>
WHERE THE WALL MODEL IS LIKE:
<?xml version="1.0" ?>
<model:physical name="walls_model"
xmlns:model="
http://playerstage.sourceforge.net/gazebo/xmlschema/#model"
xmlns:body="
http://playerstage.sourceforge.net/gazebo/xmlschema/#body"
xmlns:geom="
http://playerstage.sourceforge.net/gazebo/xmlschema/#geom" >
<static>true</static>
<body:map name="walls_body">
<xyz>-16 -16 0 </xyz>
<geom:map name="walls_geom">
<image>bar_map_no_obstacles.png</image> <!-- for now this is in the gazebo model dir, change later-->
<!--<image>bar_map_with_obstacles.png</image> -->
<height>2</height>
<threshold>200</threshold>
<granularity>1</granularity>
<negative>false</negative>
<scale>0.08</scale>
<offset>0 0 0</offset>
<material>Gazebo/White</material>
</geom:map>
</body:map>
</model:physical>
That all, I dont know where i can start to solve this!!!!
Thanks
Nicolas
From:
johnhsu@willowgarage.com
Date: Wed, 15 Dec 2010 12:05:37 -0800
Subject: Re: [ros-users] Gazebo and Laser simulation
To:
nicolasapicco@hotmail.com
Hi Nicolas,
It would help if you can post the commands you are using to run your simulation. Also, if you're trying to attach an image that is too large (>150KB) for the mailing list, you can convert it to a compressed format such as jpg or alternatively use one of the free online gallery hosting services.
John
2010/12/15 Nicolás Alvarez Picco <
nicolasapicco@hotmail.com>
Hi!!
I am simulating a robot with a laser in Gazebo and it works quite well, but there are times when there is a desalinate between the orientation of the robot and the map, I mean the border of the map doesn't match with the laser points. As actually I dont know to much of gazebo and I didnt find anywhere this error, now I am asking to the list. It must be a problem with the tf, but the weird thing is that I do not have always this problems, just some times, but when it appears it continue like this until I finish the program.
I would like to add an image for u to see, but each time I try to add image my msg is rejected.
Thanks in advanced
Nicolas
_______________________________________________
ros-users mailing list
ros-users@code.ros.org
https://code.ros.org/mailman/listinfo/ros-users




 (text/plain)
(text/plain)
