Is there a comprehensive guide on this? I am not sure what those "make sure"
mean. Am I suppose to get a warning message for these? I've attached the
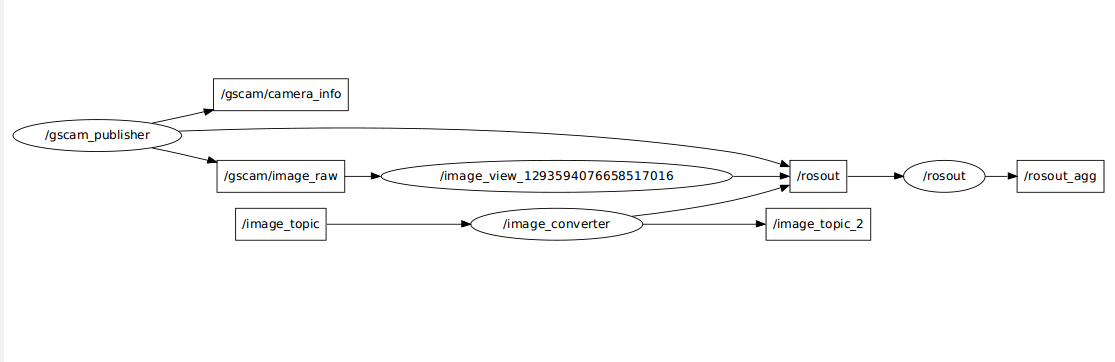
rxgraph see if it helps.
On Thu, Dec 23, 2010 at 8:28 AM, Tully Foote <
tfoote@willowgarage.com>wrote:
> Have you been through the network troubleshooting page?
> http://www.ros.org/wiki/ROS/Troubleshooting#Network_Configuration
>
> Tully
>
>
> On Tue, Dec 21, 2010 at 1:58 AM, Homer Manalo <homer.manalo@roboteknik.com
> > wrote:
>
>> Yes I can see it. I'm actually using this line:
>> rosrun image_view image_view image:=/gscam/image_raw
>>
>> It's like there is no communication between the camera and the
>> image_converter.
>>
>> Here are some rostopic outputs:
>> Published topics:
>> * /gscam/camera_info [sensor_msgs/CameraInfo] 1 publisher
>> * /gscam/image_raw [sensor_msgs/Image] 1 publisher
>> * /rosout [roslib/Log] 3 publishers
>> * /rosout_agg [roslib/Log] 1 publisher
>> * /image_topic_2 [sensor_msgs/Image] 1 publisher
>>
>> Subscribed topics:
>> * /image_topic [sensor_msgs/Image] 1 subscriber
>> * /gscam/image_raw [sensor_msgs/Image] 1 subscriber
>> * /rosout [roslib/Log] 1 subscriber
>> homermanalo@Macmini-Linux:~/ros/stacks/pkg_test0$ rostopic info
>> /image_topic_2
>> Type: sensor_msgs/Image
>>
>> Publishers:
>> * /image_converter (http://Macmini-Linux:36632/)
>>
>> Subscribers: None
>>
>>
>> homermanalo@Macmini-Linux:~/ros/stacks/pkg_test0$ rostopic info
>> /image_topic
>> Type: sensor_msgs/Image
>>
>> Publishers: None
>>
>> Subscribers:
>> * /image_converter (http://Macmini-Linux:36632/)
>>
>>
>> homermanalo@Macmini-Linux:~/ros/stacks/pkg_test0$ rostopic info
>> /gscam/image_rawType: sensor_msgs/Image
>>
>> Publishers:
>> * /gscam_publisher (http://Macmini-Linux:60675/)
>>
>> Subscribers:
>> * /image_view_1292924423744539054 (http://Macmini-Linux:51945/)
>>
>> thanks
>>
>>
>> On Tue, Dec 21, 2010 at 5:26 PM, Billy Okal <b.okal@jacobs-university.de>wrote:
>>
>>> Hi Manalo,
>>>
>>> you can see the mages using image_view
>>>
>>> image_view image:=<image topic> [image transport type]
>>>
>>> More info here
>>>
>>> http://www.ros.org/wiki/image_view
>>>
>>> billy
>>>
>>>
>>> On 21 December 2010 08:32, Homer Manalo <homer.manalo@roboteknik.com>wrote:
>>>
>>>> I want to start opencv with this tutorial<http://www.ros.org/wiki/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages>but it doesn't work for me.
>>>>
>>>> I created a new package then added the cpp file to the src folder then
>>>> added this line: rosbuild_add_executable(pkg_test0_imgToCv
>>>> src/pkg_test0_imgToCv.cpp) to the CMakeLists.txt file. I already added the
>>>> dependencies to the manifest file. Then make.
>>>>
>>>> When I run it nothing happens, I expect the highgui would appear. I can
>>>> confirm that my camera(gscam) is streaming images. I can see that the topics
>>>> listed are active but using echo on the image_topic and image_topic_2 prints
>>>> out nothing. Using rxgraph, there are only the gstreamer_publisher node and
>>>> image_converter node connected to rosout node. Did I miss something? How do
>>>> I get this thing to work?
>>>>
>>>> thanks
>>>>
>>>> _______________________________________________
>>>> ros-users mailing list
>>>> ros-users@code.ros.org
>>>> https://code.ros.org/mailman/listinfo/ros-users
>>>>
>>>>
>>>
>>>
>>> --
>>> Billy Okal
>>> Jacobs University Bremen
>>>
>>> ----------------------------------------------------------------------------------------------------------------------
>>> "Science without Religion is Lame and Religion without Science is Blind",
>>> Albert Einstein
>>>
>>> _______________________________________________
>>> ros-users mailing list
>>> ros-users@code.ros.org
>>> https://code.ros.org/mailman/listinfo/ros-users
>>>
>>>
>>
>> _______________________________________________
>> ros-users mailing list
>> ros-users@code.ros.org
>> https://code.ros.org/mailman/listinfo/ros-users
>>
>>
>
>
> --
> Tully Foote
> Systems Engineer
> Willow Garage, Inc.
> tfoote@willowgarage.com
> (650) 475-2827
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users
>
>



 (text/plain)
(text/plain)
