I did the vslam tutorial but I don't know what's happening:
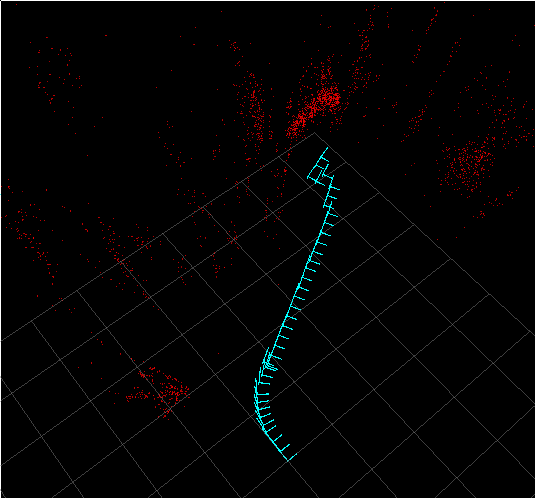
1. The camera pose track is not as accurate as the screenshot on the
tutorial page(Screenshot-1.png).
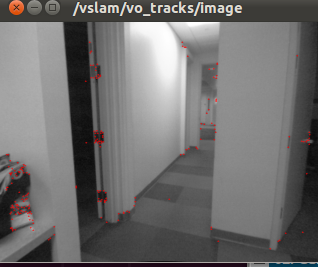
2. There are no blue lines(Screenshot-2.png).
3. Rviz suddenly quits saying:
/opt/ros/cturtle/ros/bin/rosrun: line 35: 3274 Segmentation
fault $exepath "$@"
The rosbag window actually says Done. Somewhere at Screenshot-2.png is
the end.
4. Is it normally slow?
I tested it with a live stereo camera and had the following:
1. The vslam node suddenly dies after some time:
[stereo_vslam_node-1] process has died [pid 4290, exit code 1].
log files:
/home/roboteknik/.ros/log/bdfb27d4-2da9-11e0-b4da-00012e2bb8e1/stereo_vslam_node-1*.log
2. Is it normally slow (<0.4Hz)?
[roscpp_internal] [2011-02-01 10:23:29,366] [thread 0x7f2f3abfb9a0]: [DEBUG] UDPROS server listening on port [38235]
[roscpp_internal] [2011-02-01 10:23:29,436] [thread 0x7f2f3abfb9a0]: [DEBUG] Started node [/stereo/stereo_vslam_node], pid [4290], bound on [roboteknik-desktop], xmlrpc port [51964], tcpros port [60715], logging to [/home/roboteknik/.ros/log/bdfb27d4-2da9-11e0-b4da-00012e2bb8e1/stereo_vslam_node-1.log], using [real] time
[roscpp_internal] [2011-02-01 10:23:29,463] [thread 0x7f2f2412c700]: [DEBUG] Accepted connection on socket [7], new socket [10]
[roscpp_internal] [2011-02-01 10:23:29,463] [thread 0x7f2f2412c700]: [DEBUG] TCPROS received a connection from [127.0.0.1:58262]
[roscpp_internal] [2011-02-01 10:23:29,464] [thread 0x7f2f2412c700]: [DEBUG] Connection: Creating TransportSubscriberLink for topic [/rosout] connected to [callerid=[/rosout] address=[TCPROS connection to [127.0.0.1:58262 on socket 10]]]
[roscpp_internal] [2011-02-01 10:23:29,692] [thread 0x7f2f3abfb9a0]: [DEBUG] XML-RPC call [searchParam] returned an error (-1): [Cannot find parameter [tf_prefix] in an upwards search]
[roscpp_internal] [2011-02-01 10:23:29,695] [thread 0x7f2f3abfb9a0]: [DEBUG] Publisher update for [/tf]: already have these connections:
[roscpp_internal] [2011-02-01 10:23:29,696] [thread 0x7f2f3abfb9a0]: [DEBUG] Creating intraprocess link for topic [/tf]
[roscpp_internal] [2011-02-01 10:23:29,699] [thread 0x7f2f3abfb9a0]: [DEBUG] Publisher update for [/reset_time]: already have these connections:
[roscpp_internal] [2011-02-01 10:23:29,701] [thread 0x7f2f3abfb9a0]: [DEBUG] XML-RPC call [lookupService] returned an error (-1): [no provider]
[roscpp_internal] [2011-02-01 10:23:29,706] [thread 0x7f2f3abfb9a0]: [DEBUG] XML-RPC call [searchParam] returned an error (-1): [Cannot find parameter [tf_prefix] in an upwards search]
[roscpp_internal] [2011-02-01 10:23:31,859] [thread 0x7f2f3abfb9a0]: [DEBUG] Publisher update for [/stereo/left/image_rect]:
http://roboteknik-desktop:42008/, already have these connections:
[roscpp_internal] [2011-02-01 10:23:31,860] [thread 0x7f2f3abfb9a0]: [DEBUG] Began asynchronous xmlrpc connection to [roboteknik-desktop:42008]
[roscpp_internal] [2011-02-01 10:23:31,863] [thread 0x7f2f3abfb9a0]: [DEBUG] Publisher update for [/stereo/left/camera_info]:
http://roboteknik-desktop:53131/, already have these connections:
[roscpp_internal] [2011-02-01 10:23:31,864] [thread 0x7f2f3abfb9a0]: [DEBUG] Began asynchronous xmlrpc connection to [roboteknik-desktop:53131]
[roscpp_internal] [2011-02-01 10:23:31,869] [thread 0x7f2f3abfb9a0]: [DEBUG] Publisher update for [/stereo/right/image_rect]:
http://roboteknik-desktop:42008/, already have these connections:
[roscpp_internal] [2011-02-01 10:23:31,869] [thread 0x7f2f3abfb9a0]: [DEBUG] Began asynchronous xmlrpc connection to [roboteknik-desktop:42008]
[roscpp_internal] [2011-02-01 10:23:31,871] [thread 0x7f2f2412c700]: [DEBUG] Accepted connection on socket [7], new socket [15]
[roscpp_internal] [2011-02-01 10:23:31,871] [thread 0x7f2f2412c700]: [DEBUG] TCPROS received a connection from [127.0.0.1:58371]
[roscpp_internal] [2011-02-01 10:23:31,872] [thread 0x7f2f2412c700]: [DEBUG] Connection: Creating TransportSubscriberLink for topic [/vslam/vo_tracks/image] connected to [callerid=[/vo_tracks_view] address=[TCPROS connection to [127.0.0.1:58371 on socket 15]]]
[roscpp_internal] [2011-02-01 10:23:31,874] [thread 0x7f2f3abfb9a0]: [DEBUG] Publisher update for [/stereo/right/camera_info]:
http://roboteknik-desktop:53131/, already have these connections:
[roscpp_internal] [2011-02-01 10:23:31,874] [thread 0x7f2f3abfb9a0]: [DEBUG] Began asynchronous xmlrpc connection to [roboteknik-desktop:53131]
[roscpp_internal] [2011-02-01 10:23:31,882] [thread 0x7f2f2392b700]: [DEBUG] Connecting via tcpros to topic [/stereo/left/image_rect] at host [roboteknik-desktop:45184]
[roscpp_internal] [2011-02-01 10:23:31,882] [thread 0x7f2f2392b700]: [DEBUG] Resolved publisher host [roboteknik-desktop] to [127.0.0.1] for socket [16]
[roscpp_internal] [2011-02-01 10:23:31,883] [thread 0x7f2f2392b700]: [DEBUG] Async connect() in progress to [roboteknik-desktop:45184] on socket [16]
[roscpp_internal] [2011-02-01 10:23:31,883] [thread 0x7f2f2392b700]: [DEBUG] Connected to publisher of topic [/stereo/left/image_rect] at [roboteknik-desktop:45184]
[roscpp_internal] [2011-02-01 10:23:31,883] [thread 0x7f2f2392b700]: [DEBUG] Connecting via tcpros to topic [/stereo/left/camera_info] at host [roboteknik-desktop:58182]
[roscpp_internal] [2011-02-01 10:23:31,883] [thread 0x7f2f2392b700]: [DEBUG] Resolved publisher host [roboteknik-desktop] to [127.0.0.1] for socket [17]
[roscpp_internal] [2011-02-01 10:23:31,883] [thread 0x7f2f2392b700]: [DEBUG] Async connect() in progress to [roboteknik-desktop:58182] on socket [17]
[roscpp_internal] [2011-02-01 10:23:31,884] [thread 0x7f2f2392b700]: [DEBUG] Connected to publisher of topic [/stereo/left/camera_info] at [roboteknik-desktop:58182]
[roscpp_internal] [2011-02-01 10:23:31,884] [thread 0x7f2f2392b700]: [DEBUG] Connecting via tcpros to topic [/stereo/right/image_rect] at host [roboteknik-desktop:45184]
[roscpp_internal] [2011-02-01 10:23:31,884] [thread 0x7f2f2392b700]: [DEBUG] Resolved publisher host [roboteknik-desktop] to [127.0.0.1] for socket [18]
[roscpp_internal] [2011-02-01 10:23:31,884] [thread 0x7f2f2392b700]: [DEBUG] Async connect() in progress to [roboteknik-desktop:45184] on socket [18]
[roscpp_internal] [2011-02-01 10:23:31,884] [thread 0x7f2f2392b700]: [DEBUG] Connected to publisher of topic [/stereo/right/image_rect] at [roboteknik-desktop:45184]
[roscpp_internal] [2011-02-01 10:23:31,899] [thread 0x7f2f2392b700]: [DEBUG] Connecting via tcpros to topic [/stereo/right/camera_info] at host [roboteknik-desktop:58182]
[roscpp_internal] [2011-02-01 10:23:31,900] [thread 0x7f2f2392b700]: [DEBUG] Resolved publisher host [roboteknik-desktop] to [127.0.0.1] for socket [12]
[roscpp_internal] [2011-02-01 10:23:31,900] [thread 0x7f2f2392b700]: [DEBUG] Async connect() in progress to [roboteknik-desktop:58182] on socket [12]
[roscpp_internal] [2011-02-01 10:23:31,900] [thread 0x7f2f2392b700]: [DEBUG] Connected to publisher of topic [/stereo/right/camera_info] at [roboteknik-desktop:58182]
[ros.vslam_system] [2011-02-01 10:23:31,962] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6156
[ros.vslam_system] [2011-02-01 10:23:32,101] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6160
[ros.vslam_system] [2011-02-01 10:23:32,548] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6173
[ros.vslam_system] [2011-02-01 10:23:33,061] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6188
[ros.vslam_system] [2011-02-01 10:23:33,443] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6200
[ros.vslam_system] [2011-02-01 10:23:33,803] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6211
[ros.vslam_system] [2011-02-01 10:23:34,171] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6222
[ros.vslam_system] [2011-02-01 10:23:34,612] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6235
[ros.vslam_system] [2011-02-01 10:23:35,076] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6249
[ros.vslam_system] [2011-02-01 10:23:35,714] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6268
[ros.vslam_system] [2011-02-01 10:23:36,073] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6279
[ros.vslam_system] [2011-02-01 10:23:36,549] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6293
[ros.vslam_system] [2011-02-01 10:23:37,119] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6310
[ros.vslam_system] [2011-02-01 10:23:37,875] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6333
[ros.vslam_system] [2011-02-01 10:23:38,348] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6347
[ros.vslam_system] [2011-02-01 10:23:38,750] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6359
[ros.vslam_system] [2011-02-01 10:23:39,149] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6371
[ros.vslam_system] [2011-02-01 10:23:39,523] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6382
[ros.vslam_system] [2011-02-01 10:23:40,074] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6399
[ros.vslam_system] [2011-02-01 10:23:40,693] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6417
[ros.vslam_system] [2011-02-01 10:23:41,140] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6431
[ros.vslam_system] [2011-02-01 10:23:41,688] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6447
[ros.vslam_system] [2011-02-01 10:23:42,222] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6463
[ros.vslam_system] [2011-02-01 10:23:42,808] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6481
[ros.vslam_system] [2011-02-01 10:23:43,449] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6500
[ros.vslam_system] [2011-02-01 10:23:44,143] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6521
[ros.vslam_system] [2011-02-01 10:23:44,856] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6542
[ros.vslam_system] [2011-02-01 10:23:45,638] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6564
[roscpp_internal] [2011-02-01 10:23:45,709] [thread 0x7f2f2412c700]: [DEBUG] Accepted connection on socket [7], new socket [11]
[roscpp_internal] [2011-02-01 10:23:45,709] [thread 0x7f2f2412c700]: [DEBUG] TCPROS received a connection from [127.0.0.1:58407]
[roscpp_internal] [2011-02-01 10:23:45,710] [thread 0x7f2f2412c700]: [DEBUG] Connection: Creating TransportSubscriberLink for topic [/tf] connected to [callerid=[/rviz_1296527022947751984] address=[TCPROS connection to [127.0.0.1:58407 on socket 11]]]
[ros.vslam_system] [2011-02-01 10:23:46,446] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6589
[roscpp_internal] [2011-02-01 10:23:46,549] [thread 0x7f2f2412c700]: [DEBUG] Accepted connection on socket [7], new socket [14]
[roscpp_internal] [2011-02-01 10:23:46,549] [thread 0x7f2f2412c700]: [DEBUG] TCPROS received a connection from [127.0.0.1:58426]
[roscpp_internal] [2011-02-01 10:23:46,549] [thread 0x7f2f2412c700]: [DEBUG] Connection: Creating TransportSubscriberLink for topic [/vslam/cameras] connected to [callerid=[/rviz_1296527022947751984] address=[TCPROS connection to [127.0.0.1:58426 on socket 14]]]
[roscpp_internal] [2011-02-01 10:23:46,641] [thread 0x7f2f2412c700]: [DEBUG] Accepted connection on socket [7], new socket [19]
[roscpp_internal] [2011-02-01 10:23:46,641] [thread 0x7f2f2412c700]: [DEBUG] TCPROS received a connection from [127.0.0.1:58434]
[roscpp_internal] [2011-02-01 10:23:46,642] [thread 0x7f2f2412c700]: [DEBUG] Connection: Creating TransportSubscriberLink for topic [/vslam/points] connected to [callerid=[/rviz_1296527022947751984] address=[TCPROS connection to [127.0.0.1:58434 on socket 19]]]
[ros.vslam_system] [2011-02-01 10:23:47,210] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6612
[ros.vslam_system] [2011-02-01 10:23:47,852] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6631
[ros.vslam_system] [2011-02-01 10:23:48,286] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6644
[ros.vslam_system] [2011-02-01 10:23:48,824] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6660
[ros.vslam_system] [2011-02-01 10:23:49,427] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6678
[ros.vslam_system] [2011-02-01 10:23:50,057] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6697
[ros.vslam_system] [2011-02-01 10:23:50,666] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6714
[ros.vslam_system] [2011-02-01 10:23:51,099] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6726
[ros.vslam_system] [2011-02-01 10:23:51,634] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6742
[ros.vslam_system] [2011-02-01 10:23:52,232] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6760
[ros.vslam_system] [2011-02-01 10:23:52,924] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6779
[ros.vslam_system] [2011-02-01 10:23:53,423] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6793
[ros.vslam_system] [2011-02-01 10:23:53,924] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6807
[ros.vslam_system] [2011-02-01 10:23:54,422] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6821
[ros.vslam_system] [2011-02-01 10:23:54,897] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6834
[ros.vslam_system] [2011-02-01 10:23:55,253] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6845
[ros.vslam_system] [2011-02-01 10:23:55,696] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6858
[ros.vslam_system] [2011-02-01 10:23:56,428] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6878
[ros.vslam_system] [2011-02-01 10:23:56,923] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6893
[ros.vslam_system] [2011-02-01 10:23:57,426] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6907
[ros.vslam_system] [2011-02-01 10:23:57,903] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6920
[ros.vslam_system] [2011-02-01 10:23:58,364] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6932
[ros.vslam_system] [2011-02-01 10:23:58,909] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6948
[ros.vslam_system] [2011-02-01 10:23:59,434] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6963
[ros.vslam_system] [2011-02-01 10:23:59,985] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6978
[ros.vslam_system] [2011-02-01 10:24:00,478] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 6993
[ros.vslam_system] [2011-02-01 10:24:01,009] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7009
[ros.vslam_system] [2011-02-01 10:24:01,530] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7025
[ros.vslam_system] [2011-02-01 10:24:02,015] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7039
[ros.vslam_system] [2011-02-01 10:24:02,502] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7053
[ros.vslam_system] [2011-02-01 10:24:02,900] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7065
[ros.vslam_system] [2011-02-01 10:24:03,238] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7075
[ros.vslam_system] [2011-02-01 10:24:03,672] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7088
[ros.vslam_system] [2011-02-01 10:24:04,040] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7099
[ros.vslam_system] [2011-02-01 10:24:04,563] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7114
[ros.vslam_system] [2011-02-01 10:24:05,146] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7132
[ros.vslam_system] [2011-02-01 10:24:05,655] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7147
[ros.vslam_system] [2011-02-01 10:24:06,167] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7163
[ros.vslam_system] [2011-02-01 10:24:06,666] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7178
[ros.vslam_system] [2011-02-01 10:24:07,121] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7190
[ros.vslam_system] [2011-02-01 10:24:07,561] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7203
[ros.vslam_system] [2011-02-01 10:24:08,085] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7218
[ros.vslam_system] [2011-02-01 10:24:08,613] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7234
[ros.vslam_system] [2011-02-01 10:24:09,061] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7247
[ros.vslam_system] [2011-02-01 10:24:09,347] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7255
[ros.vslam_system] [2011-02-01 10:24:09,745] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7267
[ros.vslam_system] [2011-02-01 10:24:10,150] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7279
[ros.vslam_system] [2011-02-01 10:24:10,545] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7291
[ros.vslam_system] [2011-02-01 10:24:10,960] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7303
[ros.vslam_system] [2011-02-01 10:24:11,408] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7317
[ros.vslam_system] [2011-02-01 10:24:11,738] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7327
[ros.vslam_system] [2011-02-01 10:24:12,182] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7340
[ros.vslam_system] [2011-02-01 10:24:12,584] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7352
[ros.vslam_system] [2011-02-01 10:24:13,074] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7367
[ros.vslam_system] [2011-02-01 10:24:13,580] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7382
[ros.vslam_system] [2011-02-01 10:24:14,023] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7394
[ros.vslam_system] [2011-02-01 10:24:14,348] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7404
[ros.vslam_system] [2011-02-01 10:24:14,714] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7415
[ros.vslam_system] [2011-02-01 10:24:15,045] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7425
[ros.vslam_system] [2011-02-01 10:24:15,412] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7436
[ros.vslam_system] [2011-02-01 10:24:15,723] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7445
[ros.vslam_system] [2011-02-01 10:24:16,185] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7459
[ros.vslam_system] [2011-02-01 10:24:16,625] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7472
[ros.vslam_system] [2011-02-01 10:24:16,981] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7483
[ros.vslam_system] [2011-02-01 10:24:17,413] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7496
[ros.vslam_system] [2011-02-01 10:24:17,817] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7508
[ros.vslam_system] [2011-02-01 10:24:18,258] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7521
[ros.vslam_system] [2011-02-01 10:24:18,579] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7531
[ros.vslam_system] [2011-02-01 10:24:18,922] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7541
[ros.vslam_system] [2011-02-01 10:24:19,317] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7553
[ros.vslam_system] [2011-02-01 10:24:19,633] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7562
[ros.vslam_system] [2011-02-01 10:24:19,982] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7573
[ros.vslam_system] [2011-02-01 10:24:20,485] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7588
[ros.vslam_system] [2011-02-01 10:24:20,868] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7599
[ros.vslam_system] [2011-02-01 10:24:21,267] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7611
[ros.vslam_system] [2011-02-01 10:24:21,650] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7623
[ros.vslam_system] [2011-02-01 10:24:22,158] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7638
[ros.vslam_system] [2011-02-01 10:24:22,554] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7650
[ros.vslam_system] [2011-02-01 10:24:22,863] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7659
[ros.vslam_system] [2011-02-01 10:24:23,194] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7669
[ros.vslam_system] [2011-02-01 10:24:23,554] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7680
[ros.vslam_system] [2011-02-01 10:24:23,865] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7689
[ros.vslam_system] [2011-02-01 10:24:24,185] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7699
[ros.vslam_system] [2011-02-01 10:24:24,533] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7709
[ros.vslam_system] [2011-02-01 10:24:24,870] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7719
[ros.vslam_system] [2011-02-01 10:24:25,257] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7731
[ros.vslam_system] [2011-02-01 10:24:25,601] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7741
[ros.vslam_system] [2011-02-01 10:24:26,025] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7754
[ros.vslam_system] [2011-02-01 10:24:26,476] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7767
[ros.vslam_system] [2011-02-01 10:24:26,829] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7778
[ros.vslam_system] [2011-02-01 10:24:27,162] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7788
[ros.vslam_system] [2011-02-01 10:24:27,562] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7800
[ros.vslam_system] [2011-02-01 10:24:27,959] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7812
[ros.vslam_system] [2011-02-01 10:24:28,297] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7822
[ros.vslam_system] [2011-02-01 10:24:28,609] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7831
[ros.vslam_system] [2011-02-01 10:24:29,003] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7843
[ros.vslam_system] [2011-02-01 10:24:29,361] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7854
[ros.vslam_system] [2011-02-01 10:24:29,688] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7864
[ros.vslam_system] [2011-02-01 10:24:30,005] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7873
[ros.vslam_system] [2011-02-01 10:24:30,442] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7886
[ros.vslam_system] [2011-02-01 10:24:30,731] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7895
[ros.vslam_system] [2011-02-01 10:24:31,029] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7904
[ros.vslam_system] [2011-02-01 10:24:31,329] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7913
[ros.vslam_system] [2011-02-01 10:24:31,727] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7925
[ros.vslam_system] [2011-02-01 10:24:32,486] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7947
[ros.vslam_system] [2011-02-01 10:24:33,048] [thread 0x7f2f3abfb9a0]: [INFO] In callback, seq = 7963
[roscpp_internal] [2011-02-01 10:24:33,616] [thread 0x7f2f3abfb9a0]: [DEBUG] shutting down due to exit() or end of main() without cleanup of all NodeHandles
[roscpp_internal] [2011-02-01 10:24:33,616] [thread 0x7f2f3abfb9a0]: [DEBUG] Shutting down roscpp
[roscpp_internal] [2011-02-01 10:24:33,653] [thread 0x7f2f3abfb9a0]: [DEBUG] Shutting down topics...
[roscpp_internal] [2011-02-01 10:24:33,653] [thread 0x7f2f3abfb9a0]: [DEBUG] shutting down publishers
[roscpp_internal] [2011-02-01 10:24:33,665] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to subscriber [callerid=[/rosout] address=[TCPROS connection to [127.0.0.1:58262 on socket 10]]] to topic [/rosout] dropped
[roscpp_internal] [2011-02-01 10:24:33,665] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [10] closed
[roscpp_internal] [2011-02-01 10:24:33,694] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to local publisher on topic [/tf] dropped
[roscpp_internal] [2011-02-01 10:24:33,694] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to local subscriber on topic [/tf] dropped
[roscpp_internal] [2011-02-01 10:24:33,695] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to subscriber [callerid=[/rviz_1296527022947751984] address=[TCPROS connection to [127.0.0.1:58407 on socket 11]]] to topic [/tf] dropped
[roscpp_internal] [2011-02-01 10:24:33,695] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [11] closed
[roscpp_internal] [2011-02-01 10:24:33,758] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to subscriber [callerid=[/rviz_1296527022947751984] address=[TCPROS connection to [127.0.0.1:58426 on socket 14]]] to topic [/vslam/cameras] dropped
[roscpp_internal] [2011-02-01 10:24:33,758] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [14] closed
[roscpp_internal] [2011-02-01 10:24:33,771] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to subscriber [callerid=[/rviz_1296527022947751984] address=[TCPROS connection to [127.0.0.1:58434 on socket 19]]] to topic [/vslam/points] dropped
[roscpp_internal] [2011-02-01 10:24:33,771] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [19] closed
[roscpp_internal] [2011-02-01 10:24:33,865] [thread 0x7f2f3abfb9a0]: [DEBUG] Connection to subscriber [callerid=[/vo_tracks_view] address=[TCPROS connection to [127.0.0.1:58371 on socket 15]]] to topic [/vslam/vo_tracks/image] dropped
[roscpp_internal] [2011-02-01 10:24:33,865] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [15] closed
[roscpp_internal] [2011-02-01 10:24:33,925] [thread 0x7f2f3abfb9a0]: [DEBUG] shutting down subscribers
[roscpp_internal] [2011-02-01 10:24:33,960] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [16] closed
[roscpp_internal] [2011-02-01 10:24:33,966] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [17] closed
[roscpp_internal] [2011-02-01 10:24:33,969] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [18] closed
[roscpp_internal] [2011-02-01 10:24:33,972] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [12] closed
[roscpp_internal] [2011-02-01 10:24:33,972] [thread 0x7f2f3abfb9a0]: [DEBUG] ServiceManager::shutdown(): unregistering our advertised services
[roscpp_internal] [2011-02-01 10:24:33,986] [thread 0x7f2f3abfb9a0]: [DEBUG] UDP socket [8] closed
[roscpp_internal] [2011-02-01 10:24:33,986] [thread 0x7f2f3abfb9a0]: [DEBUG] TCP socket [7] closed
[roscpp_internal] [2011-02-01 10:24:33,996] [thread 0x7f2f3abfb9a0]: [DEBUG] Shutdown finished





 (text/plain)
(text/plain)