Hi Marcus,
I haven't thought through use cases very much but one application would
be creating a library of human gestures and poses that the robot can
learn to recognize. The only reason I created a Skeleton message type
for my pi_tracker package is that I wanted to have access to the joint
confidence values. Otherwise, I think the standard ROS tf/tfMessage
type comes close.
In the meantime, and just for fun, I have created a skeleton_markers
package at:
http://www.ros.org/wiki/skeleton_markers
This allows the visualization of the tracked joints in RViz. There are
two ways to run the package--two different Python scripts: one is used
with pi_tracker and subscribes to the skeleton message topic. The other
uses just the transforms published by the openni_tracker package. See
the Wiki page for details. Here is a short video of the result:
http://www.youtube.com/watch?v=nTRi_kIgGW0
--patrick
On 03/26/2011 03:27 PM, Marcus Liebhardt wrote:
> Hi there!
>
> That indeed looks like a tree to me.
> I would be interested in the use cases you have in mind for these
> skeleton messages.
> What information would you like to gather in those messages?
> Poses of the tracked frames, interconnections of each frame, also
> distances between the connected frames?
>
> I don't have deep knowledge about the processing of the KInect or the
> openni_tracker. I'm currently just using the transforms. But I think
> there are simplifications made for some frames, which could be useful
> to take into account. For example, I think the neck is always half way
> between the left and right shoulder, and the head is always on top of
> it. Things like that might be interesting as well to keep in the
> message, so that one can easily reproduce the previously mentioned
> skeleton - if that is one of the use cases.
>
> Best regards,
>
> :-) Marcus
>
>
>
> 2011/3/26 Patrick Goebel <patrick@pirobot.org
> <mailto:patrick@pirobot.org>>
>
> I see what you mean--the user looks more like a cactus than a
> tree. :))) However, I think if you take the torso joint as the
> root, don't you end up with a tree structure? e.g.
>
> torso->neck->head
> torso->left_shoulder->left_elbow->left_hand
> torso->right_shoulder->right_elbow->right_hand
> torso->left_hip->left_knee->left_foot
> torso->right_hip->right_knee->right_foot
>
> Maybe this is what you meant by it depends on how you define them.
>
> --patrick
>
>
> On 03/26/2011 12:22 PM, David Lu!! wrote:
>> It depends on how you define them. The skeleton visualized with
>> the kinect (
>> http://www.ros.org/wiki/openni_tracker?action=AttachFile&do=get&target=nite.png
>> <http://www.ros.org/wiki/openni_tracker?action=AttachFile&do=get&target=nite.png>)
>> isn't a tree, although it could be converted to be one, I suppose
>>
>> On Sat, Mar 26, 2011 at 1:11 PM, Patrick Goebel
>> <patrick@pirobot.org <mailto:patrick@pirobot.org>> wrote:
>>
>> Hi David,
>>
>> I agree it would be nice to have a standardized Skeleton
>> message. If all skeleton's are trees (is this true?) then
>> perhaps an existing tree message type could be used if it
>> exists. KDL has kinematic chains and tf is already built
>> around trees (right?). That's about as far as I've thought
>> it through...
>>
>> --patrick
>>
>>
>> On 03/22/2011 04:17 PM, David Lu!! wrote:
>>> Hey Ros-users-
>>>
>>> Has there been any talk of creating a standardized Skeleton
>>> message? Right now, it seems like the openni_tracker package
>>> just publishes transforms. It seems like if the Kinect does
>>> skeleton tracking, there should be a skeleton message.
>>>
>>> I know pi_tracker has its own Skeleton message, which looks
>>> like it might fit the bill, although I don't think it
>>> defines which parts are connected (hip bone is connected to
>>> the thigh bone).
>>> http://www.ros.org/doc/api/pi_tracker/html/msg/Skeleton.html
>>>
>>> It might be good to have for not only the Kinect, but for
>>> other motion capture rigs (Vicon and the like).
>>>
>>> Are there any other similar message out there?
>>>
>>> -David!!
>>>
>>>
>>> _______________________________________________
>>> ros-users mailing list
>>> ros-users@code.ros.org <mailto:ros-users@code.ros.org>
>>> https://code.ros.org/mailman/listinfo/ros-users
>>
>>
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org <mailto:ros-users@code.ros.org>
> https://code.ros.org/mailman/listinfo/ros-users
>
>
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users






 (text/plain)
(text/plain)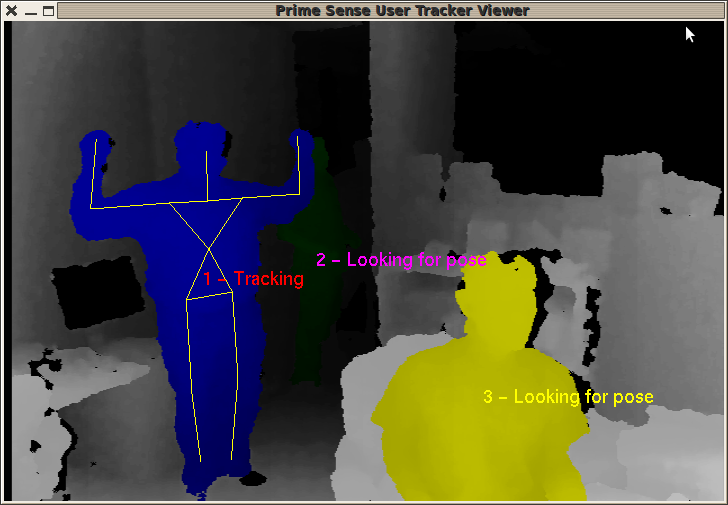{kind=link}