Hi everyone,
I am working with the simulation of my robot in ROS-Gazebo. The situation is
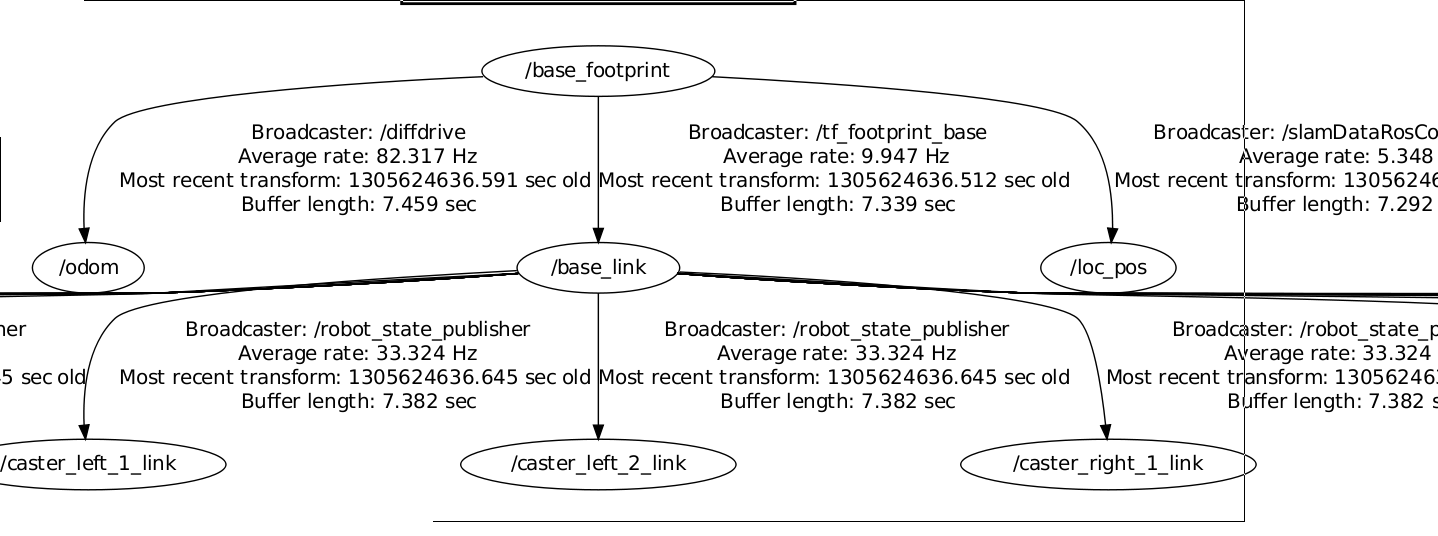
that I need different sources of localization, so I made them all childs of
'base_footprint' (as can be seen in the picture attached, two localization
sources are depicted, 'odom' and 'los_pos' as well as 'base_link' where the
rest of the robot tf is described).
The problem is that, in order to achieve that situation, I had to modify the
gazebo_plugin diffdrive, indicating the tf transform to be a child of the
base_footprint, instead of been the parent of 'base_link'.
Now, I don't know if modifying the diffdrive plugin code is the best way of
doing it, since it means that I will have to keep this mod in mind everytime
there is an update from Willow Garage of the diffdrive code.
My question is, is there a better way to change the tf transform of the
odometry from parent to child, without having to go to the code and modify
it?.
In case there is no other way, as I suspect from what I have seen in other
related messages posted in the list, is there a plan about changing the
diffdrive plugin to a version where the odom is a child instead of a parent
of base_footprint.
In case required I can provide the patch for this mod.
Best
--
--
__________________________
Ricardo A. Tellez
AI Research Engineer
Pal Robotics
phone: +34 93 414 53 47
email:
ricardo.tellez@pal-robotics.com
web:
http://www.pal-robotics.com
__________________________





 (text/plain)
(text/plain)