Hi everyone,
We have put together a small stack with IMU-related tools, available here:
http://www.ros.org/wiki/imu_tools
The stack contains two packages:
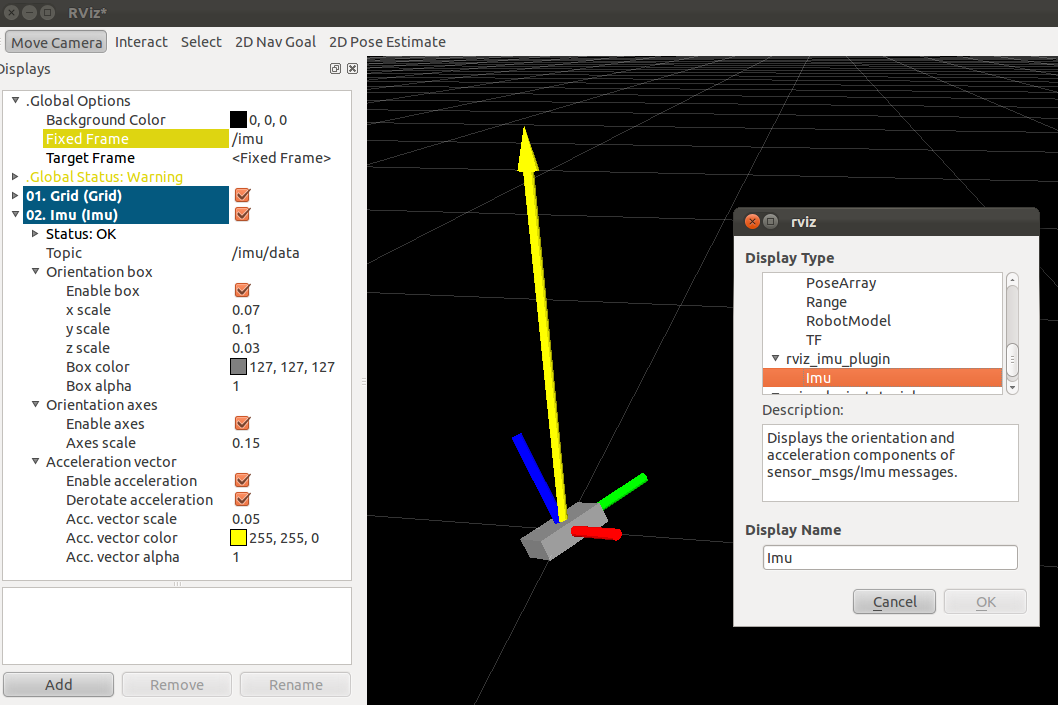
* rviz_imu_plugin - A plugin for rviz which visualizes IMU messages,
displaying sensor orientation and acceleration.
* imu_filter_madgwick - a general-purpose filter which fuses angular
velocities, linear accelerations, and (optionally) magnetic field
readings into an orientation quaternion. We've tested this with a
Phidgets Spatial 3/3/3 IMU sensor (phidgets stack also coming soon).
More info is available at the wiki pages. As always, we welcome any
feedback and suggestions.
Cheers,
Ivan
--
Ivan Dryanovski
Research Assistant, CCNY Robotics Lab
City University of New York (CUNY)
http://robotics.ccny.cuny.edu/People/Dryanovski





 (text/plain)
(text/plain)