Tully Foote wrote:
> Simon,
> Sorry about that. In our restructuring for releases, this package was
> accidentally left out. We will work on getting it reviewed and
> released shortly.
>
> For now you can check it out into your ros tree using the following
> command.
>
> svn co https://code.ros.org/svn/wg-ros-pkg/trunk/sandbox/teleop_base
>
> Tully
>
> On Thu, Mar 11, 2010 at 9:54 AM, Cheng Ye <yc00001@surrey.ac.uk
> <mailto:yc00001@surrey.ac.uk>> wrote:
>
> Hi Guys,
>
> I'm trying to run the simulation with stage according to this page:
> http://www.ros.org/wiki/simulator_stage/Tutorials/SimulatingOneRobot
>
> But I can't find the teleop_base. So how can I drive the robot in
> stage by keyboard?
>
> Cheers,
> Simon
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org <mailto:ros-users@code.ros.org>
> https://code.ros.org/mailman/listinfo/ros-users
>
>
>
>
> --
> Tully Foote
> Systems Engineer
> Willow Garage, Inc.
> tfoote@willowgarage.com <mailto:tfoote@willowgarage.com>
> (650) 475-2827
> ------------------------------------------------------------------------
>
> _______________________________________________
> ros-users mailing list
> ros-users@code.ros.org
> https://code.ros.org/mailman/listinfo/ros-users
>
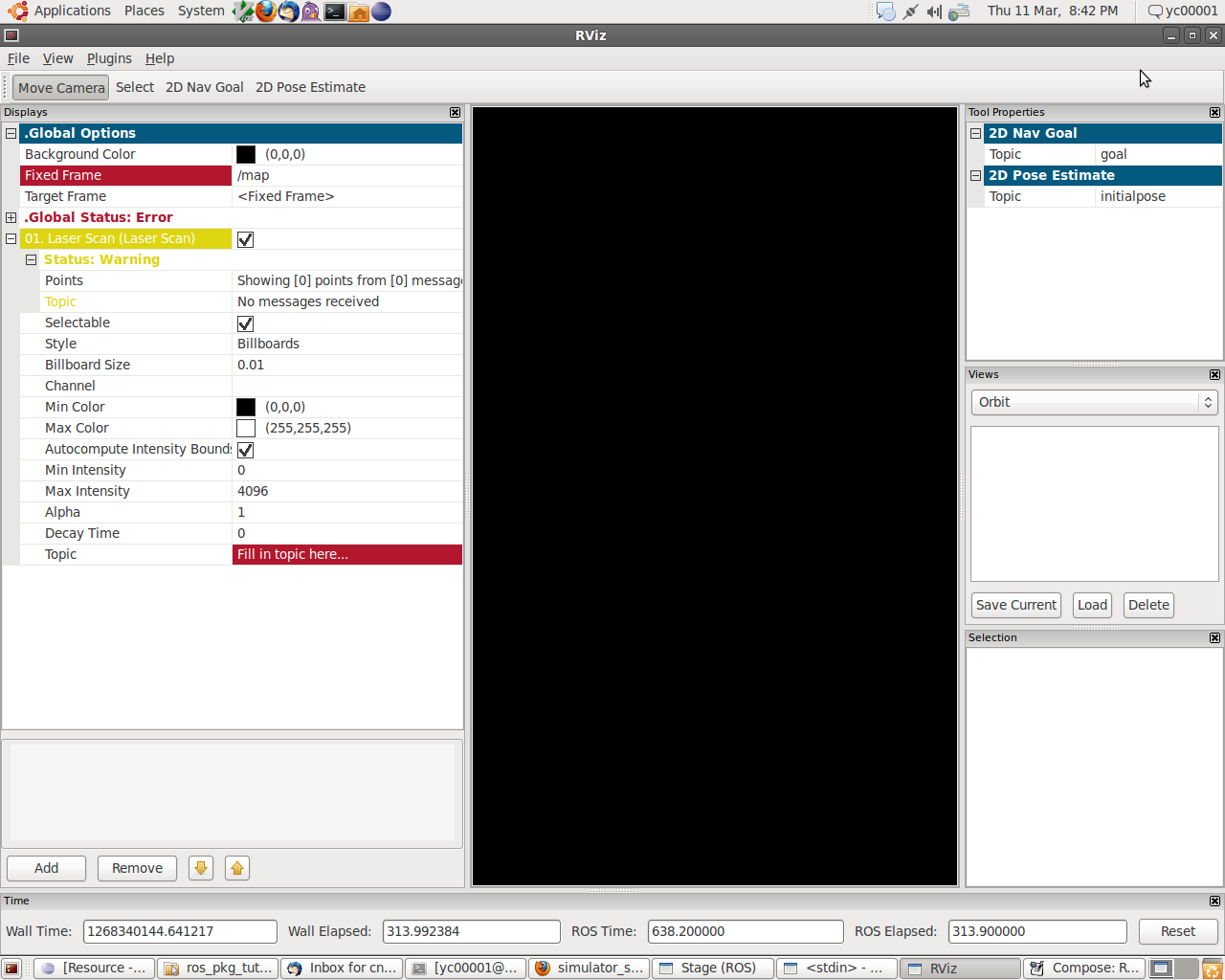
Hi Tully,
Thank you very much, this teleop_base package is working now. But when I run the rviz, I can't get any
laser scan graph, I attach the screen-shot here. So what shall I do?
Cheers,
Simon





 (text/plain)
(text/plain)