Dear Brian,
* DDS definitely is a very interesting candidate. If it comes to QoS,
it is the most standardized and most advanced approach. In
particular, due to the high degree of standardization, different
implementations of the DDS standard can smoothly interact.
Let me give some more hints:
* I have been wondering for a long time why robotics more or less
ignored so far existing middleware standards and often comes up with
solutions ignoring the achievements in the scientific community of
distributed / middleware systems. That is in particular interesting
since in robotics, we need the most advanced middleware systems
(scalability across different H/W and OS platforms ranging from
embedded to full-scale systems, QoS, partly even realtime etc.). The
DDS standard deals with many of these things!
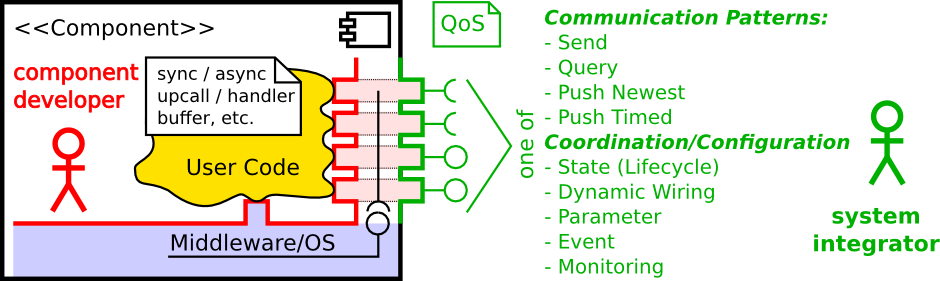
* "freedom from choice" instead of "freedom of choice":
o it will be decisive not just to migrate to DDS (or any other
middleware) and then present the complexity of DDS ("freedom of
choice") to the robotics user (configuring DDS is complex but
that is because DDS is powerful). We need to have an abstraction
layer (execution container) that comprises "robotics
communication patterns" ("freedom from choice") like query
(request / response) and push (publish / subscribe). These
provide stable interfaces to the robotics experts but can be
mapped onto whatever middleware that is appropriate. Going
beyond state-of-the-art would introduce QoS attributes with such
communication patterns and mapping them with QoS will most
likely consider DDS a very good candidate.
o this way, you separate the "robotics communication patterns"
from the middleware and ignoring that separation unfortunately
has a long tradition in robotics: for very good reasons, you
should not expose the complexity of CORBA, zeroMQ, ACE, ACE/TAO,
DDS to the robotics user but should have framework experts that
once do these mappings
* If you are interested in such communication patterns (and how they
can be mapped onto different middleware systems, but right now still
without QoS), you might want have a look at the "SmartSoft
communication patterns"
http://www.intechopen.com/books/robotic-systems-applications-control-and-programming/robotic-software-systems-from-code-driven-to-model-driven-software-development
Christian
Am 12.02.2014 17:56, schrieb Brian Gerkey:
> hi,
>
> As we work on improving the communications middleware within ROS, one
> of the approaches that has come up repeatedly is DDS (Data
> Distribution Service; http://portals.omg.org/dds/). There are lots of
> positive aspects of DDS as a middleware, and of course some tradeoffs
> (e.g., in exchange for lots of features in the message transport, the
> API is incredibly verbose; while there are open source
> implementations, there's not the feeling of an active community doing
> development on them).
>
> We'd like to understand what the level of interest is within the ROS
> community for DDS support.
>
> So, for those of you who already know something about DDS (especially
> if you have experience using it), here are some questions to start a
> discussion. Don't feel obliged to answer every question, and also
> feel free to answer questions not asked here. If you prefer, you can
> reply directly to me, and we'll anonymize your comments before
> potentially sharing them.
>
> What's your opinion of DDS (good, bad, ugly, other)? If you like DDS,
> why? If you don't like it, why not?
>
> How would you compare DDS to the ROS middleware?
>
> Do you see others in your field using DDS? Have you ever wished that
> ROS could "speak DDS"? Have you already used DDS in combination with
> ROS?
>
> thanks,
> brian.
> _______________________________________________
> ros-users mailing list
> ros-users@lists.ros.org
> http://lists.ros.org/mailman/listinfo/ros-users
>
--
Prof. Dr. Christian Schlegel
Prodekan, Studiendekan Master IS
Fakultät Informatik
Hochschule Ulm
Tel.: 0731 / 50-28242
http://www.hs-ulm.de/schlegel
http://www.servicerobotik-ulm.de/
http://www.zafh-servicerobotik.de/ (Sprecher)
http://www.youtube.com/user/roboticsathsulm
http://smart-robotics.sourceforge.net/
http://www.joser.org/
_______________________________________________
ros-users mailing list
ros-users@lists.ros.org
http://lists.ros.org/mailman/listinfo/ros-users













 (text/plain)
(text/plain)