Hi Eitan!
> Thanks so much for finding this, I've fixed the bug in both trunk (rev
> 28749) and the 1.0 branch (rev 28750) of navigation and the fixes will go
> out with the next patch release of both the 1.0 and the 1.1 series. I'll try
> to push out patch releases either later today or tomorrow and I believe it
> should fix the problem you're seeing.
>
I had a look at the fixed navfn now, and the paths indeed look a lot
nicer and smoother now. Thanks!
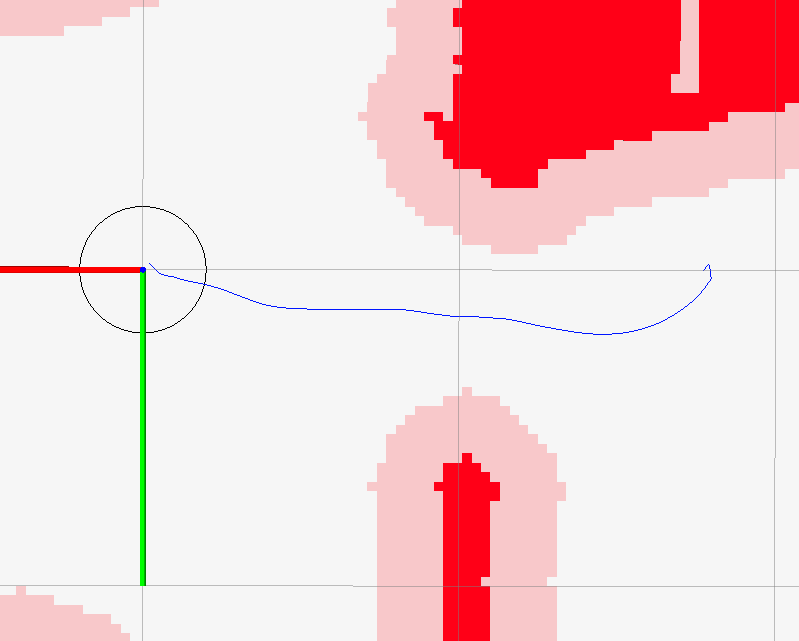
Now only the strange behavior at the start and the end of a path remain,
as seen in the attached screenshot. It seems like the computed path
starts and ends at the top right grid cell center of the actual start
and goal position, with an added (unsmooth) path segment from the
computed goal to the requested one. The effect is of course more
pronounced in larger grid resolutions (and also happend in my empty test
case map). Is that something fixable in the navfn code?
If it's only possible to plan on grid cell centers, a workaround could
be to start and end the computed path on the grid cell that is between
the actual (requested) goal and start and then adding a first and last
segment which extends the computed path in a similar direction. That
should cause a less discontinuous curve.
Cheers,
Armin
--
Armin Hornung Albert-Ludwigs-Universität
www.informatik.uni-freiburg.de/~hornunga Dept. of Computer Science
HornungA@informatik.uni-freiburg.de Humanoid Robots Lab
Tel.: +49 (0)761-203-8010 Georges-Köhler-Allee 79
Fax : +49 (0)761-203-8007 D-79110 Freiburg, Germany







 (text/plain)
(text/plain)