It depends on how you define them. The skeleton visualized with the kinect (
http://www.ros.org/wiki/openni_tracker?action=AttachFile&do=get&target=nite.png)
isn't a tree, although it could be converted to be one, I suppose
On Sat, Mar 26, 2011 at 1:11 PM, Patrick Goebel <
patrick@pirobot.org> wrote:
> Hi David,
>
> I agree it would be nice to have a standardized Skeleton message. If all
> skeleton's are trees (is this true?) then perhaps an existing tree message
> type could be used if it exists. KDL has kinematic chains and tf is already
> built around trees (right?). That's about as far as I've thought it
> through...
>
> --patrick
>
>
> On 03/22/2011 04:17 PM, David Lu!! wrote:
>
> Hey Ros-users-
>
> Has there been any talk of creating a standardized Skeleton message?
> Right now, it seems like the openni_tracker package just publishes
> transforms. It seems like if the Kinect does skeleton tracking, there should
> be a skeleton message.
>
> I know pi_tracker has its own Skeleton message, which looks like it might
> fit the bill, although I don't think it defines which parts are connected
> (hip bone is connected to the thigh bone).
> http://www.ros.org/doc/api/pi_tracker/html/msg/Skeleton.html
>
> It might be good to have for not only the Kinect, but for other motion
> capture rigs (Vicon and the like).
>
> Are there any other similar message out there?
>
> -David!!
>
>
> _______________________________________________
> ros-users mailing listros-users@code.ros.orghttps://code.ros.org/mailman/listinfo/ros-users
>
>




%0A>%20isn't%20a%20tree,%20although%20it%20could%20be%20converted%20to%20be%20one,%20I%20suppose%0A>%20%0A>%20On%20Sat,%20Mar%2026,%202011%20at%201:11%20PM,%20Patrick%20Goebel%20<patrick@pirobot.org>%20wrote:%0A>%20%0A>%20>%20%20Hi%20David,%0A>%20>%0A>%20>%20I%20agree%20it%20would%20be%20nice%20to%20have%20a%20standardized%20Skeleton%20message.%20%20If%20all%0A>%20>%20skeleton's%20are%20trees%20(is%20this%20true?)%20then%20perhaps%20an%20existing%20tree%20message%0A>%20>%20type%20could%20be%20used%20if%20it%20exists.%20%20KDL%20has%20kinematic%20chains%20and%20tf%20is%20already%0A>%20>%20built%20around%20trees%20(right?).%20%20That's%20about%20as%20far%20as%20I've%20thought%20it%0A>%20>%20through...%0A>%20>%0A>%20>%20--patrick%0A>%20>%0A>%20>%0A>%20>%20On%2003/22/2011%2004:17%20PM,%20David%20Lu!!%20wrote:%0A>%20>%0A>%20>%20Hey%20Ros-users-%0A>%20>%0A>%20>%20%20Has%20there%20been%20any%20talk%20of%20creating%20a%20standardized%20Skeleton%20message?%0A>%20>%20Right%20now,%20it%20seems%20like%20the%20openni_tracker%20package%20just%20publishes%0A>%20>%20transforms.%20It%20seems%20like%20if%20the%20Kinect%20does%20skeleton%20tracking,%20there%20should%0A>%20>%20be%20a%20skeleton%20message.%0A>%20>%0A>%20>%20%20I%20know%20pi_tracker%20has%20its%20own%20Skeleton%20message,%20which%20looks%20like%20it%20might%0A>%20>%20fit%20the%20bill,%20although%20I%20don't%20think%20it%20defines%20which%20parts%20are%20connected%0A>%20>%20(hip%20bone%20is%20connected%20to%20the%20thigh%20bone).%0A>%20>%20%20http://www.ros.org/doc/api/pi_tracker/html/msg/Skeleton.html%0A>%20>%0A>%20>%20%20It%20might%20be%20good%20to%20have%20for%20not%20only%20the%20Kinect,%20but%20for%20other%20motion%0A>%20>%20capture%20rigs%20(Vicon%20and%20the%20like).%0A>%20>%0A>%20>%20%20Are%20there%20any%20other%20similar%20message%20out%20there?%0A>%20>%0A>%20>%20%20-David!!%0A>%20>%0A>%20>%0A>%20>%20_______________________________________________%0A>%20>%20ros-users%20mailing%20listros-users@code.ros.orghttps://code.ros.org/mailman/listinfo/ros-users%0A>%20>%0A>%20>%0A>%20 "Besvar denne besked")
 (text/plain)
(text/plain)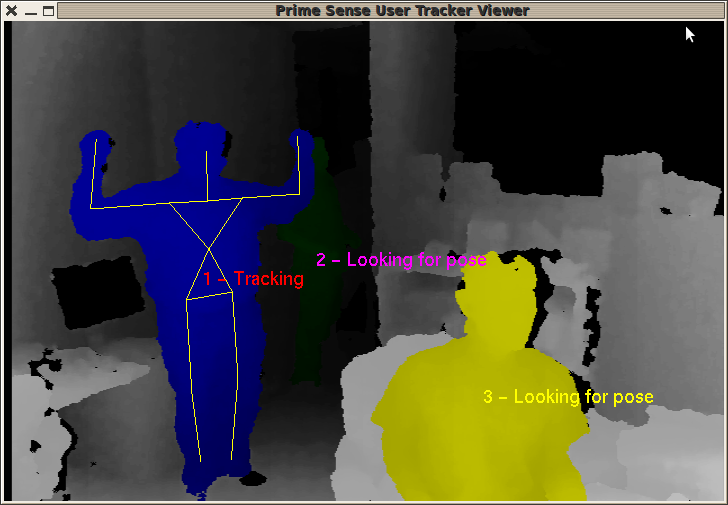{kind=link}